
定義
力矩 (moment of force) 力對物體產生轉動作用的物理量。可以分為力對軸的矩和力對點的矩。即:M=LxF。其中L是從轉動軸到著力點的距離矢量, F是矢量力;力矩也是矢量。
 力矩
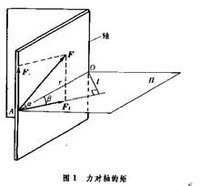
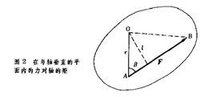
力矩力對軸的矩是力對物體產生繞某一軸轉動作用的物理量,其大小等於力在垂直於該軸的平面上的分量和此分力作用線到該軸垂直距離的乘積。例如開門時,外力F平行於門軸的分力FП不能對門產生轉動作用(圖1),因為這力已被固定軸的約束力(見約束)所平衡。對門能起轉動作用的力是F在垂直於門軸的平面上的分力F⊥,其數值F⊥=Fcosα。自F的作用點A作垂直於軸的平面П,與軸相交於O點。由實驗得知,力F對物體的轉動作用與O至F⊥的垂直距離l成正比。l稱為F⊥對軸的力臂,它等於rsinβ,其中r=OA;β是F⊥與OA的夾角。因此,力F對物體的轉動作用由Fcosα和rsinβ的乘積來確定,這個物理量稱為力F對軸的矩,它是個代數量。當α=0°和β=90°時,力F對軸的矩最大,因此,要提高轉動效率,作用力F應在軸的垂直平面內,並使其垂直於聯線OA。如果力F在軸的垂直平面內(圖2),力對軸的矩為rFsinβ。此量也可用△OAB面積的二倍來表示,其中AB=F。
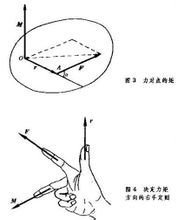
力對點的矩是力對物體產生繞某-點轉動作用的物理量,等於力作用點位置矢和力矢的矢量積。倒如,用球鉸鏈固定於O點的物體受瞬時力F的作用,F的作用點為A,r表示A的位置矢,r與F的夾角為α(圖3)。若物體原為靜止,受力F作用後,將沿一垂直於r和F組成的平面並通過O點的瞬時軸轉動。轉動作用的大小由rFsinα表示。由於瞬時軸有方向性,因此將力F對點O之矩定義為一個矢量,用M表示,即M=r×F。M的正向可由右手定則決定(圖4);M的大小等於以r和F為邊的三角形面積的二倍。
 力矩
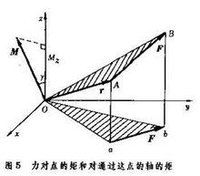
力矩力F對O點的矩M,在過矩心O的直角坐標軸上有三個投影Mx、My、Mz。可以證明,Mz就是F對z軸的矩(圖5)。
上述力矩概念中的"軸"和"點"都取自實物。但研究力學問題時可以不必考慮這些實物,對空間任何點和線都可以定義力對點的矩和力對軸的矩。
力矩的量綱是力×距離;與能量的量綱相同。但是力矩通常用牛頓
 力矩
力矩-米,而不是用焦耳作為單位。力矩的單位由力和力臂的單位決定。
 力矩
力矩單位
單位變換
力矩的量綱是距離乘以力;依照國際單位制,力矩的單位是牛頓-米。雖然牛頓與米的次序,在數學上,是可以變換的。BIPM (國際重量測量局) 設定這次序應是牛頓-米,而不是米-牛頓。
國際單位制
依照國際單位制,能量與功量的單位是焦耳,定義為 1 牛頓-米。但是,焦耳不是力矩的單位。因為,能量是力點積距離的標量;而力矩是距離叉積力的偽矢量。當然,量綱相同並不僅是巧合;使 1 牛頓-米的力矩,作用一全轉,需要恰巧 2*Pi 焦耳的能量。
爭議
事實上,力矩與能量的關係是能量和一個對數矢量2π[lnK]的乘積,即t=2πQ[lnK],[lnk]的方向垂直於作用平面。因此用焦耳做單位也不是錯誤的。做圓周運動時,K=e,因此使 1 牛頓-米的力矩,作用一全轉,需要恰巧 2*Pi 焦耳的能量。
觀念介紹
靜力
當一個物體在靜態平衡時,靜作用力是零,對任何一點的淨力矩也是零。關於二維空間,平衡的要求是:
x,y方向合力均為0,且合力矩為0。
動力
力矩是角動量隨時間的導數,就像力是動量隨時間的導數。
剛體的角動量是轉動慣量乘以角速度。
什麼是力矩電動機
所謂的力矩電動機是一種扁平型多極永磁直流電動機。其電樞有較多的槽數、換向片數和串聯導體數,以降低轉矩脈動和轉速脈動。力矩電動機有直流力矩電動機和交流力矩電動機兩種。
其中,直流力矩電動機的自感電抗很小,所以回響性很好;其輸出力矩與輸入電流成正比,與轉子的速度和位置無關;它可以在接近堵轉狀態下直接和負載連線低速運行而不用齒輪減速,所以在負載的軸上能產生很高的力矩對慣性比,並能消除由於使用減速齒輪而產生的系統誤差。
交流力矩電動機又可以分為同步和異步兩種,常用的是鼠籠型異步力矩電動機,它具有低轉速和大力矩的特點。一般地,在紡織工業中經常使用交流力矩電動機,其工作原理和結構和單相異步電動機的相同,但是由於鼠籠型轉子的電阻較大,所以其機械特性較軟。
