
概述
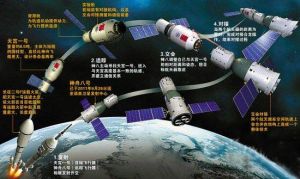 神舟八號與天宮一號對接示意圖
神舟八號與天宮一號對接示意圖 神舟八號飛船,是中國神舟系列飛船的第八個,是一艘無人飛船,它發射升空後,與天宮一號對接,成為一座小型空間站。2005年底,神舟八號首次對接緩衝試驗在上海成功。
神舟六號返回後,中國載人航天工程進入第二階段,包括三步驟:第一步是航天員出艙,由神舟七號完成;第二步是交會對接,這是神八的目標;而第三步則是建立空間實驗室。
基本信息
飛行器名稱:神舟八號飛船
飛行器生產國家:中華人民共和國
發射時間:2011年11月
 1
1 發射地點: 酒泉衛星發射中心載人航天發射場( 內蒙古自治區 阿拉善盟額濟納旗境內)
發射目的:屬於航天發射第二步第二階段空間實驗室階段任務,建成中國首個空間實驗室,為中國航天第三步建設空間站做準備。
發射項目:發射後數天內與 天宮一號目標飛行器完成兩次對接任務,並返回地球。
飛船結構
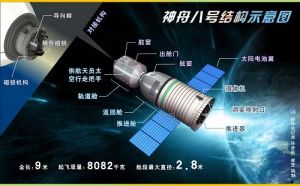 神舟八號結構示意圖
神舟八號結構示意圖 神舟八號飛船為三艙結構,由軌道艙、返回艙和推進艙組成。
飛船軌道艙前端安裝自動式對接機構,具備自動和手動交會對接與分離功能。
神舟八號將基本成為中國的標準型空間渡船,未來實現批量生產。
構造參數
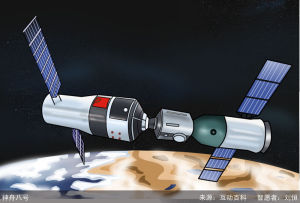 天神對接
天神對接 “神八”為改進型飛船,全長9米,最大直徑2.8米,起飛質量8082公斤。
發射神舟八號飛船的改進型“長征二號”F遙八火箭,全長58.3米,起飛質量497噸,運載能力為8130公斤。
與以往飛船發射不同,這次交會對接任務要求飛船“零視窗”發射。
技術特點
神舟八號飛船在前期飛船的基礎上,進行了較大的技術改進,全船一共有600多台套的設備,一半以上發生了技術狀態的變化,在這中間,新研製的設備、新增加的設備就占了15%,主要變化是兩個方面:
 1
1 具備了自動和手動交會對接功能,為此新增加和改進了一些設備。比如新研製了異體同構周邊式構型和多種交會對接測量設備,用於交會對接自主控制的飛行軟體、控制軟體,也是全新設計和研發的。為了滿足交會對接的任務,飛船上增加配置了平移和反推發動機。同時,航天員的手動控制設備也進行了改進。
現在的飛船在前期具備57天自主飛行的能力基礎上,已具備停靠180天的能力。神舟八號飛船電源帆板因為採用了新的太陽電池片,發電能力提高了50%。飛船的降落傘系統和著陸緩衝系統也進行了技術上的改進,提高了使用的可靠性
發射計畫
2011年10月26日上午,神舟八號飛船、長征二號F遙八火箭,開始進行垂直轉運,標誌著神八發射已進入倒計時。
“神舟八號”飛船11月1日升空,與9月底發射的“天宮一號”目標飛行器實現交會對接。
 1
1 “神舟八號”飛船發射採用的是“零視窗”發射,這還是神舟飛船首次“零視窗”發射。 “神八”與“天宮一號”交會對接飛行過程分為遠距離段引段、自主控制段、對接段、組合體飛行段和分離撤離段。
2011年11月1日5時58分,中國“長征二號F”遙八運載火箭在酒泉衛星發射中心點火起飛,“神舟八號”飛船發射升空。
四大看點
看點一 交會對接
 執行中國首次空間交會對接任務的神舟八號飛船、長征二號F遙八火箭
執行中國首次空間交會對接任務的神舟八號飛船、長征二號F遙八火箭 神舟八號飛船為改進型載人飛船,具備自動和手動交會對接功能。 升空後的神舟八號與天宮一號目標飛行器在地面人員控制將進行下首次進行空間交會對接,突破和驗證組合體工作模式,並將開展空間科學實驗。
神舟八號飛船在2011年11月3日凌晨與9月29日升空的天宮一號進行第一次對接。組合飛行12天之後,11月14號,神八將撤離天宮一號,再次進行對接。
看點二 飛船定型
天宮一號發射成功後,中國神舟系列飛船將在神舟八號基本定型,成為標準型空間渡船,其外形等基本要素都將保持不變。
看點三 升空時間
神舟八號飛船在台北時間2011年11月1日5時58分發射,10月31日當天實施運載火箭推進劑加注。
看點四 飛船類型
神舟八號發射目標飛行器,不載人。
 1
1 發射意義
標誌著中國已經初步掌握空間交會對接能力,擁有建設簡易空間實驗室,即短期無人照料的空間站的能力。
 1
1 對接實錄
首次對接
2011年11月3日00:34 飛船從5公里停泊點向400米停泊點前進。
 1
1 00:41 用於交會對接的目標飛行器天宮一號,經過第4圈和第13圈兩次變軌,目前位於距地球343公里的近圓軌道上。
00:42 北京飛控中心預報:神舟八號飛船將於01時07分進入400米停泊點。
00:46 遠距離導引段自神舟八號飛船入軌後開始,在地面測控通信系統的導引下,飛船經過5次變軌控制,於2日深夜飛抵天宮一號後下方約52公里處,轉入自主控制飛行狀態。
00:48 神舟八號萬里追趕天宮一號。天宮一號在固定的軌道上運行,發動機並不工作;而神舟八號則通過不斷的變軌來拉近兩者之間的距離。
01:01 飛船對接機構對接準備。
01:03 神舟八號對接環推出。
01:05 神舟八號對接準備完成。
01:05 飛船第30圈,天宮第541圈,進入馬林迪站和天鏈01星跟蹤弧段內,飛船進入400米停泊點。
01:06 地面對神舟八號對接機構的推出和準備情況進行確認後,飛船再次前進。
 2
2 01:10 神舟八號與天宮一號的距離正不斷縮短。相對導航狀態正常。
01:10 空空通信正常。
01:11 天宮一號、神舟八號相對距離目前為270米。
01:16 交會對接的接近段已經結束,即將進入平移靠攏段,飛船經過兩天多的飛行,與天宮一號的距離只剩最後的140米。
01:19 雷射雷達導航。
01:20 CCD導航。
01:20 神舟八號從140米停泊點開始前進,正沿直線緩緩接近天宮一號。
01:21 天宮一號目標飛行器是倒飛狀態,神舟八號是正飛。
01:21 飛船正在接近30米停泊點。
01:22 飛船雷射雷達切近場合作目標。
01:23 飛船自主進入30米停泊點,稍做停泊。
01:27 飛船轉最後靠攏。
01:29 對接環接觸。
01:29 神舟八號對接機構上的5個環失衡感測器實時下傳的數據表明,兩個太空飛行器已經成功接觸。
01:29 飛船尾部4台發動機隨即點火,給飛船提供一個對接推力。
01:29 對接機構捕獲。
01:29 飛船對接機構上的3把捕獲鎖與天宮一號對接機構上的3個卡板器咬合。
01:30 完成捕獲。飛船發動機鏇即關機。
01:30 兩個太空飛行器完成柔性連線,連線後仍能相互移動。
01:30 飛船對接機構的機械緩衝系統完成緩衝和校正,在緩衝過程中,儲存和消耗能量,校正對接換姿態,使其處於水平位置。
01:30 對接鎖鎖緊開始。
01:30 神舟八號對接機構的對接換環收回,拉近兩太空飛行器,兩對接機構前端框面互相貼合。
01:34 對接機構端面密封完成。
01:35 兩太空飛行器完成剛性連線。
01:35 飛船和天宮一號對接機構上各分布12個對接鎖,每個鎖由能活動的主動鉤和固定的被動鉤組成。
01:36 對接機構鎖緊完成。
01:37 組合體啟控。
01:38 組合體消除姿態偏差。
01:41 組合體消除偏完成。
01:42 北京飛控中心宣布:對接機構鎖緊,天宮一號啟控,天宮一號、神舟八號交會對接完成。
第二次對接
2011年11月14日20時,在北京航天飛行控制中心的精確控制下,天宮一號與神舟八號成功進行了第二次交會對接。這次對接進一步考核檢驗了交會對接測量設備和對接機構的功能與性能,獲取了相關數據,達到了預期目的。
背後故事
抵達距“天宮一號”約5公里的對接入口點。隨後,從對接機構接觸開始,經過捕獲、緩衝、拉近、鎖緊4個步驟,實現了剛性連線,形成組合體,開始了為時兩天的整體飛行。
兩個8噸重“龐然大物”的高精度對接,對接機構中小到指甲大小的齒輪和針頭大小的接口都要嚴絲合縫,無異於“針尖對針尖”。首次交會對接任務的成功,意味著繼美、俄之後,中國成為第三個獨立掌握交會對接技術的國家,這為我國今後開展更大規模的空間探索奠定了紮實的技術基礎。
在接下來的12天中,“天宮一號”與“神舟八號”還將進行第二次交會對接試驗。
早在“神舟八號”發射之前,記者便來到酒泉衛星發射中心探營,見證了這一場太空中的“穿針引線”背後的艱辛。
突發事件
“‘天宮’在天上等著‘神八’赴約,這對飛船的發射視窗提出了非常嚴格的要求。”中國航天科技集團公司載人航天工程辦公室主任童旭東道破了緊張氛圍的緣由。
然而,正當轉場工作緊鑼密鼓地準備時,從北京傳來的一個突如其來的訊息讓每個人的心情變得暗淡下來。
“神九”上的CTU(計算機核心單元)在一個特定的溫度段發出指令時,遙測信號丟失。“這意味著如果飛船在這樣的情況下接收這樣特殊的指令,飛船瞬間會與地面失去聯繫。一旦出現這樣的意外,後果不堪構想。”童旭東告訴本刊記者。
按照原定計畫,再過兩天,“神舟八號”船箭組合體將結束測試區的各項工作,運往發射陣地,火箭發射進入“倒計時”狀態。根據航天質量管理條例,相同批次的產品出現問題,要開展舉一反三工作,及時剝離問題,確保飛行無隱患。而當這個訊息傳來時,距離船箭組合體轉運時間只剩3天了。
怎么辦?是“凍結狀態”全力舉一反三,還是邊查問題邊推進工作?此前,在“長二丙”失利後,目標飛行器和火箭試驗隊凍結了10天的工作,等待“長二丙”的事故調查。此刻,“天宮”已經在太空調整好姿態等待“神八”到來。交會對接任務對追蹤飛行器,即“神舟八號”飛船的發射視窗有非常嚴格的要求。而首次對接任務選擇在陰影區,11月份只有1號、3號和5號有發射視窗,一旦錯過,下次“太空約會”就要順延到12月底了。
在第一時間,中國航天科技集團公司組織了“兩總”迅速研討,並組織西安的專家迅速攻關。在問題發生當天,“神九”上的CTU被立即運抵西安,同時在酒泉衛星發射中心執行任務的專家連夜返回西安,進行集智攻關。大家達成一致,當前一方面是要繼續對該問題進行定位、復現,找到問題所在,同時做好“神舟八號”相關預案。
一場“三地大協同”的攻關戰役就此打響。北京、西安迅速啟動了對“神舟系列”其他產品的驗證試驗;在酒泉衛星發射中心執行“神舟八號”任務的試驗隊員很快啟動了“拆神八”的預案。
“拆卸工作非常複雜,拋開操作上的風險不說,僅僅從正常的操作工藝程式來說,就需要4天的時間。那將意味著將錯過11月1號和3號的發射視窗,發射日期將順延到5號。假如再受天氣等因素的影響,將會給決策帶來重大風險。”童旭東解釋道。
時間一分一秒走過,每個人都在等待西安試驗的結果。原定在10月25日上午10點舉行的CTU歸零會議一推再推,從10點推到下午3點,又從下午3點推到5點,又從5點推到晚上8點。
晚上9點半,當北京、上海、西安、酒泉衛星發射中心四地的專家都悉數到場時,報告人帶著“新鮮出爐”的報告還在路上。大家都在焦急地等待著。
會議很順利。經過前後方試驗隊員3天3夜的鏖戰,得出了兩個結論:一是出現問題的只是一個特定的溫度段,只會出如今地面試驗上,飛船在飛行中不會遇到;二是不會給飛船發出該條指令。而即便出現故障,飛船團隊也有預案能夠順利解決這個問題。
經過來自4地150多位專家的“集體會診”,作出了“不拆卸神八CTU”的決定,保持了“神舟八號”的原有狀態。當大家集體鼓掌通過時,人們的臉上才露出了久違的笑容。
“如今回頭來看。這個決定非常有價值。儘管該問題是由於我們的產品不夠‘強壯’所致,但是從大家的應急反應來看,證明了載人航天團隊特別能戰鬥,在關鍵時刻,基於對產品、系統的全面試驗,做了一個非常果斷的決策。”童旭東說,只有工作做細了,才能有這種果斷“拍板”的勇氣和自信。
第九次出征
在首次交會對接任務中,已經圓滿執行過7次任務的長二F火箭將再次兩度執行飛行任務,分別將“天宮一號”和“神舟八號”送入太空。
“在首次交會對接任務中,針對‘天宮一號’和‘神舟八號’的不同使命,我們共研製了兩枚火箭。從硬體來講,我們儘量保持兩枚火箭狀態的一致性,能夠通用的技術全部通用,確保研製生產過程全程可控。”火箭總設計師荊木春告訴記者,依據如今載人航天工程的發展速度,承擔著“載人使命”的長征二號F火箭即將迎來批量生產時代,確保火箭技術狀態的穩定可靠是“第一要務”。
相比於之前承擔的載人航天任務,此次遙八火箭要在1個月內執行兩次發射任務,這對長二F而言是一個不小的挑戰。而“神舟八號”任務對發射精度更是提出了嚴格要求。
為了實現“高精度”的目標,此次火箭首次採取了疊代制導的控制手段,能更好地減小入軌誤差。荊木春告訴記者,不同於攝動制導,疊代制導的入軌方式更加靈活智慧型。值得一提的是,這是該項技術首次套用在長征火箭之中。
為什麼要在發射“神舟八號”時採取疊代制導的入軌方式呢?火箭副總師宋征宇形象地給記者舉例。“如果把‘天宮一號’和‘神舟八號’的對接看成是一場接力比賽,運動員沿著直線追上被對接的隊員顯然比繞著追趕更加省力。對運動中的個體而言,橫向機動很困難。這對‘神舟八號’飛船和‘天宮一號’目標飛行器的對接也是如此,必須確保‘神八’與‘天宮’在一個軌道面。”
疊代制導的入軌方式將打破常規火箭的軌道計算模式。“以前火箭發射的入軌模式就像飛機飛行一樣,按照既定的航道飛行,當偏離航道後,自行進行調整。採用疊代制導方式後,火箭將實現一邊飛行一邊計算最適合當前狀態的入軌點,同時設計飛行軌跡,並控制火箭按照設計的軌跡飛行,這樣能夠最大程度保證火箭的入軌精度,尤其是軌道面的精度,從而實現火箭入軌的智慧型化控制。”宋征宇告訴記者,採取疊代制導後,火箭每0.02秒就要作一次入軌點預計和軌道修正,計算量比傳統制導方式增加了30多倍。
同樣舉飛機飛行的例子,受氣流因素,飛機航行時發生顛簸偏離航道是正常情況。對於火箭而言,受大氣、結構設計、發動機等因素的干擾,火箭在飛行中也很難做到完全按照預定的軌跡飛行,這就需要火箭在飛行中不斷修正軌道,從而最大程度地保證入軌點的精度。“此次疊代制導大概在火箭點火350秒後發揮作用,讓火箭在飛行的過程中實時作出軌道修正,確保把‘神舟八號’精確送入軌道。”宋征宇說。
搞火箭的人都知道,在測定發射視窗之前,首先要明確“乘客”的目的地,即衛星(飛船)的入軌點。“以前飛行器的入軌點一般在發射前1個月就能確定。此次發射“神舟八號”飛船,為了確保入軌點的精度,在發射前6小時進行最後一次測軌,並在射前4小時才最終確定要對接的‘天宮一號’在空間的軌道參數,此時我們才能知道要把“神舟八號”送到哪裡。這對我們的適應能力是一個極大的考驗。”宋征宇解釋道。
零視窗要求
執行過發射任務的人都知道,發射時刻有一個時間段,如果在發射前出現問題需要推遲,發射時間可以順延。這意味著在這個區間內的任何一個時間點內發射,都能滿足發射要求。此次“神舟八號”肩負對接使命,為了與“天宮一號”實現精確對接,工程總指揮部提出了“零視窗”的發射要求。這意味著火箭在當天的發射時間只有“一秒”的機會,錯過了就需要再擇機。
“‘天宮’在宇宙中以每秒7.8公里的第一宇宙速度在做相對運動,這意味著錯過一秒,‘天宮’就已經在天上了‘前進’了7.8公里,“神舟八號”要通過消耗自身燃料去‘追趕’目標飛行器。”荊木春形象地說。飛行器上天后靠消耗自身燃料調軌是航天發射“沒有辦法的辦法”。
“這次發射活動和之前發射衛星不同,以前的發射只需考慮衛星上天后能夠儘快把太陽能帆板對準太陽,以便能夠在第一時間獲取能量。而這次發射“神舟八號”飛船的第一任務是要為對接做準備,與‘天宮一號’這個在宇宙中運動著的龐然大物對接。”據荊木春介紹,在這樣的情況下,“零視窗”發射就顯得尤為重要。
從發射“天宮一號”起,長征二號F火箭結束了技術上“小修小補”的時代,在繼承了當今電子、信息處理、計算機等領域的技術革新成果後,在確保可靠性的前提下,長二F火箭完成了轉型,一枚性能更加優良、運載能力更加強大、載人環境更加舒適的火箭應運而生。
在2012年6月16日,神舟九號發射成功。
2013年6月中旬神舟十號飛船將搭載三位航天員飛向太空,空間站建設大幕即將拉開對於航天人來說,“大考”即將接踵而至。
回收任務
概要
中國載人航天工程新聞發言人2011年11月16日宣布,神舟八號飛船返回艙將於17日19時許返回地面。
2011年11月16日18時30分,神舟八號飛船與天宮一號目標飛行器成功分離。完成返回前狀態檢查測試和一系列準備工作後,北京航天飛行控制中心將於17日對飛船實施返回控制。
當前主著陸場區準備就緒,氣象條件符合飛船返回。17日飛船回收當天“視窗”,無小雪,雷暴、沙塵暴等惡劣天氣,地面風力4-6米/秒,滿足飛船著陸氣象條件。
神舟八號飛船於19點32分30秒平穩著陸,順利回歸到祖國懷抱。
特點
神八任務與神六、神七相比,雖然不載人,但是任務工作量增加了,工作標準提高了。主要體如今以下幾個方面:
一是應急待命時間增加。應急待命時間取決於飛船在軌時間,神六在軌運行了5天,神七在軌運行了3天,神八在軌運行17天。按照任務要求,在飛船運行過程中,著陸場每天都要處於回收待命準備狀態。
二是搜尋回收區域擴大。按照總體方案要求,飛船每天都有回收的可能性。由於回收的著陸點不同,所以搜尋區域就變大了。
三是搜尋回收時間要求縮短。神七回收時在正常情況下搜尋時間要求是6小時,如今提高到2.5小時。
四是夜間搜尋回收難度增加。夜間搜尋和白天完全不同。通過演練發現,夜間漆黑一片,伸手不見五指,直升機起飛、降落、返回艙尋找都具有一定難度。
五是飛船的有效載荷回收轉運要求嚴格。返回艙的有效載荷是中德合作研製的通用生物培養裝置,裡面有許多微生物,對環境、溫度有要求,必須在返回後第一時間送到北京處理。
過程
返回艙回收過程主要包括四個階段。
(1)跟蹤測量階段
按照飛船的飛行程式,當飛船制動發動機點火26分鐘後,返回艙就會飛到著陸場上空,白雲鄂博場區的雷達首先捕獲目標,並對其彈道進行測量,引導後續測控設備跟蹤。位於大廟場區的USB設備隨後跟蹤,同時接收飛船遙測數據並向飛船發出遙控指令。在主傘打開後,利用光學設備拍攝飛船降落全過程。
(2)搜尋尋找階段
按照程式,飛船落地前直升機就起飛到待命空域,利用直升機上裝備的定向設備接收飛船發射的信號,確認飛船的位置。由於是夜間搜尋飛行,直升機在到達返回艙地點上空後,需要持續一段時間對返回艙的狀態、姿態,以及現場地形進行確認,隨後指揮直升機首先在附近選擇合適的地方降落,並指揮其他直升機降落。
(3)現場處置階段
此時地面分隊陸續趕到,按照工作流程對返回艙進行處置,主要包括外觀檢查、艙內氣體檢測、微生物檢測、有效載荷的拆卸。
(4)回收轉運階段
將有效載荷快速運到中科院,將返回艙運到呼市火車站再到北京交給有關單位。
神舟八號的意義:宇宙的視窗,世界的眼睛,茫茫宇宙中我們歡迎地球人類的探索 。
神舟系列飛船
神舟飛船是中國自行研製,具有完全自主智慧財產權,達到或優於國際第三代載人飛船技術的飛船。 神舟號飛船是採用三艙一段,即由返回艙、軌道艙、推進艙和附加段構成,由13個分系統組成。
| 編號 | 載體 | 地點 | 發射時間 | 返回時間 | 乘組 |
|---|---|---|---|---|---|
| 神舟一號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 1999年11月20日06時30分 | 1999年11月21日03時41分 | 無人飛船 |
| 神舟二號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2001年01月10日01時00分 | 2001年01月16日19時22分 | 無人飛船 |
| 神舟三號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2002年03月25日22時15分 | 2002年04月01日16時54分 | 搭載模擬人 |
| 神舟四號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2002年12月30日00時40分 | 2003年01月05日19時16分 | 搭載模擬人 |
| 神舟五號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2003年10月15日09時00分 | 2003年10月16日6時28分 | 楊利偉 |
| 神舟六號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2005年10月12日09時00分 | 2005年10月17日4時32分 | 費俊龍、聶海勝 |
| 神舟七號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2008年9月25日21時10分4秒 | 2008年9月28日17時37分 | 翟志剛、劉伯明、景海鵬 |
| 神舟八號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2011年11月01日05時58分10秒 | 2011年11月17日19時32分 | 搭載模擬人 |
| 神舟九號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2012年06月16日18時37分24秒 | 2012年6月29日10時07分 | 景海鵬、劉旺、劉洋 |
| 神舟十號 | 新型長征二號F捆綁式火箭 | 酒泉衛星發射中心 | 2013年6月11日17時38分 | 待定 | 聶海勝、張曉光、王亞平 |
太空飛行器分類導航
| 太空飛行器,又稱空間飛行器、太空載具等,是指在地球大氣層以外的宇宙空間中,基本按照天體力學的規律運動的各種飛行器。 | |||
| 航天套用 | 間諜衛星 | 氣象衛星 | 太空探索 |
| 衛星導航系統 | |||
| 載人航天 | 太空人 | 航天計畫 | 運載火箭 |
| 太空飛行器 | 運載工具 | 太空梭 | 運載火箭 |
| 空間站 | 載人飛船 | 月球太空飛行器 | |
| 空間探測器 | 人造衛星 | ||
