
簡單介紹
空間交會對接,簡稱交會對接,是指兩個太空飛行器(宇宙飛船、太空梭等)在空間軌道上會合併在結構上連成一個整體的技術,它是實現航天站、太空梭、太空平台和空間運輸系統的空間裝配、回收、補給、維修、航天員交換及營救等在軌道上服務的先決條件。
實現交會與對接是由交會與對接系統完成的,它通常包括跟蹤測量系統、姿態與軌道控制系統、對接機構機械系統等。一般是首先由地面發射追蹤太空飛行器,由地面控制,使它按比目標太空飛行器稍微低一點的圓軌道運行;接著,通過霍曼變軌,使其進入與目標太空飛行器高度基本一致的軌道,並與目標太空飛行器建立通信關係;接著,追蹤太空飛行器調整自己與目標太空飛行器的相對距離和姿態,向目標太空飛行器靠近;最後當兩個太空飛行器的距離為零時,完成對接合攏操作,結束對接過程。
階段與過程
 空間交會對接示意圖
空間交會對接示意圖 在交會對接過程中,追蹤飛行器的飛行可以分為以下四個階段:
遠程導引段
在地面測控的支持下,追蹤飛行器經過若干次變軌機動,進入到追蹤太空飛行器上的感測器能捕獲目標飛行器的範圍(一般為15~100千米)。
近程導引段
追蹤飛行器根據自身的微波和雷射感測器測得的與目標飛行器的相對運動參數,自動引導到目標飛行器附近的初始瞄準點(距目標飛行器0.5~1千米)。
最終逼近段
追蹤飛行器首先捕獲目標飛行器的對接軸,當對接軸線不沿軌道飛行方向時,要求追蹤飛行器在軌道平面外進行繞飛機動,以進入對接走廊,此時兩個飛行器之間的距離約100米,相對速度約1~3米/秒。
對接停靠段
追蹤飛行器利用由攝像感測器和接近感測器組成的測量系統精確測量兩個飛行器的距離、相對速度和姿態,同時啟動小發動機進行機動,使之沿對接走廊向目標最後逼近。在對接前關閉發動機,以0.15~0.18米/秒的停靠速度與目標相撞,最後利用栓-錐或異體同構周邊對接裝置的抓手、緩衝器、傳力機構和鎖緊機構使兩個飛行器在結構上實現硬連線,完成信息傳輸匯流排、電源線和流體管線的連線。
控制類型
 國際空間站就是通過若干艙段對接而成
國際空間站就是通過若干艙段對接而成 太空飛行器空間交會對接技術的實施必須由高級控制系統來完成,根據航天員及地面站的參與程度可將控制方式劃分為如下四種類型:
遙控操作
追蹤太空飛行器的控制不依靠航天員,全部由地面站通過遙測和遙控來實現,此時要求全球設站或者有中繼衛星協助。
手動操作
在地面測控站的指導下,航天員在軌道上對追蹤太空飛行器的姿態和軌道進行觀察和判斷,然後動手操作。這是目前(2012年6月)比較成熟的方法。
自動控制
不依靠航天員,由船載設備和地面站相結合實現交會對接。該控制方法亦要求全球設站或有中繼衛星協助。
自主控制
不依靠航天員與地面站,完全由船上設備自主實現交會對接。
對接機構
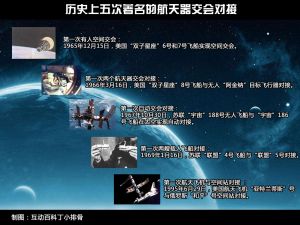 歷史上五次著名的太空飛行器交會對接
歷史上五次著名的太空飛行器交會對接 按不同的結構和原理,空間對接機構有四種:
“環-錐”式機構
“環-錐”式是最早期的對接機構,它由內截頂圓錐和外截頂圓錐組成。內截頂圓錐安裝在一系列緩衝器上,使它能吸收衝擊能量。這種結構曾用於美國的“雙子星座”飛船與“阿金納”火箭以及美國“雙子星座”飛船之間的對接等。“桿-錐”(也叫“栓-錐”)式機構
“桿-錐”式是在兩個太空飛行器對接面上分別裝有栓和錐的對接機構,即一個太空飛行器的對接機構內裝有接收錐,另一個太空飛行器上裝有對接碰撞桿,在對接時,碰撞桿漸漸指向接收錐內,接收錐將桿頭鎖定。由於這種對接結構不具備既有主動又有被動的功能,所以不利於實施空間營救。俄羅斯“聯盟”飛船與“禮炮”號空間站、“聯盟TM”飛船與“和平”號空間站,美國“阿波羅”登月艙與指令艙等的對接,都曾採用這種對接機構。
“異體同構周邊”式機構
“異體同構周邊”式對接機構可以克服“桿-錐”式機構的缺點,因為它滿足了下面兩個要求:
①對接機構是異體同構,使太空飛行器既可作主動方,也能作被動方,這一點對空間救援特別重要;
②對接機構必須是周邊的,即所有定向和動力部件都安裝於中央艙口的四周,從而保證中央成為來往通道空間。蘇聯“聯盟-19”飛船與美國“阿波羅-18”飛船、太空梭與“和平”號空間站、太空梭與國際空間站等對接,都採用這種對接機構。其中,太空梭與國際空間站的對接雖然仍採用“異體同構周邊”對接機構,但增加了先進的綜合測量系統,包括GPS導航接收系統、數據跟蹤與中繼導航與通信接收系統、微波交會雷達系統、雷射對接雷達系統、光學對接攝像系統等,此外,還包括航天員顯示裝置(空間六分儀、望遠鏡、顯示器、螢光屏等)。
“抓手-碰撞鎖”式機構
“抓手-碰撞鎖”式是歐洲、日本研製的十字交叉和三點式對接機構。這兩種機構實際上性質相同,只是布局上的差別。前者在周邊布置四個抓手與撞鎖,後者在周邊布置三個抓手與撞鎖。這兩種對接機構都是無密封性能、無通道口的設計,適合與不載人太空飛行器之間的對接,如無人空間平台、空間拖船等。
測量系統
 日本無人貨運飛船與國際空間站進行對接
日本無人貨運飛船與國際空間站進行對接 先進的測量系統可以稱作是太空飛行器間進行交會與對接時的眼睛。
俄羅斯飛船與空間站對接使用的交會測量系統最早叫“針”,後來增加了數字計算機又改名為“航向”。“航向”測量系統具有可靠性高、作用距離遠的特點,尤其是不需要龐大的“和平”號空間站作任何機動和姿態變化,航天員也可藉助顯示器和鍵盤進行手動控制。該系統在中遠距離採用S頻段微波雷達,近距離有雷射測距儀、目視光學瞄準器。其S頻段微波雷達裝在飛船上,包括自動導引頭、測距儀和徑向速度測量裝置;空間站上設有信標、應答機和通信設備等相應的搜尋、捕獲定向感測器。“航向”系統共有9部天線組成搜尋捕獲和跟蹤測量系統(追蹤太空飛行器上5部,目標太空飛行器上4部),其中6部天線用於搜尋捕獲和初定向,1部用於停靠階段定向,2部用於相互跟蹤、相對運動測量和停靠階段定向。用於搜尋的天線為螺盤天線,用於跟蹤的為拋物面天線。
美國“雙子星座”飛船與“阿金納”火箭對接,使用的交會測量系統為L頻段非相干脈衝微波交會雷達、目視光學瞄準器。其中雷達作用距離為150米~450千米,目標太空飛行器上安裝應答機,由航天員通過光學瞄準器以手控方式進行交會與對接操作。美國“阿波羅”飛船指令艙與登月艙對接, 使用的交會測量系統為X頻段單脈衝連續波雷達、目視光學瞄準器。“阿波羅”與“聯盟”飛船對接也採用這套測量系統。美國太空梭與空間站對接,使用的交會測量系統是Ku頻段脈衝都卜勒雷達、目視光學瞄準器。它具有通信、收發功能,作用範圍為30米~220千米,但接近與對接仍由手動完成。
近年來,雷射雷達因具有可固化、重量輕、體積小,以及測量精度高、易於測量相對姿態的優點而倍受青睞。但目前它在國際交會與對接中尚處於試驗階段。而GPS導航定位技術相對成熟,已對空間交會與對接提供了有力的支持。
對接太空飛行器
 國際空間站與太空梭進行對接
國際空間站與太空梭進行對接 在空間交會與對接的兩個太空飛行器中,一個稱目標太空飛行器,一般是空間站或其他的大型太空飛行器,是準備對接的目標;另一個稱追蹤太空飛行器,一般是地面發射的宇宙飛船、太空梭等,是與目標太空飛行器對接的對象。對接對象也可以是太空中失控的或出現故障的太空飛行器。
太空飛行器之間在空間進行對接時要先交會,即相互接近,它是一個太空飛行器接近另一個太空飛行器的過程。具體地說,就是在太空飛行中,兩個或兩個以上的太空飛行器通過軌道參數的協調,在同一時間到達空間同一位置的過程。
兩個太空飛行器交會後要調整各自的位置,使兩個太空飛行器之間逐步達到零距離,最終啟動對接機構實現對接,在機械上聯成一體,形成更大的太空飛行器複合體。
未來套用
 空間對接模擬圖
空間對接模擬圖 在未來的空間交會與對接測量技術發展中,微波交會雷達仍將是可靠的遠距離測量手段之一,並由L、S、C頻段向Ku頻段和毫米波頻段發展;在最後逼近和對接階段,光學成像感測器有更突出的優點,所以也是國際上普遍使用的感測器;雷射雷達的優點是波束窄、解析度高、體積小、重量輕、精度高,適合於近距離測量,在各國得到廣泛重視;GPS差分測量可大大提高測量精度,日本、歐空局都將GPS作為交會對接過程中的輔助測量手段。交會對接在測量方法上已由依靠地面的非自主式測量過渡到不依靠地面的自主式測量;由航天員操作的非自主式對接發展到不依賴於航天員的自動對接。
現在,無人太空飛行器也廣泛使用交會與對接技術。例如,美國軌道復活公司研製的“軌道延壽飛行器” 裝有一種“萬能”錐型接口裝置,它可與壽命終止的通信衛星的遠地點發動機對接,構成衛星與推進艙的組合體,然後為組合體提供軌道保持和姿態控制能力,從而延長在軌通信衛星的工作壽命。美國還把自主交會對接技術用於“軌道快車”項目,它可像空中加油機一樣為“有病”的衛星治療、加注推進劑,利用這一技術也可以直接捕獲敵方衛星。
中國交會對接
神八與天宮一號對接
在2011年11月3日凌晨,神舟八號飛船與9月29日升空的天宮一號進行第一次對接。組合飛行12天之後,在11月14日,神八將撤離天宮一號,再次進行對接。17日,神舟八號返回地面。
“神舟八號”與“天宮一號”交會對接成功,為中國突破和掌握太空飛行器空間交會對接關鍵技術,初步建立長期無人在軌運行、短期有人照料的載人空間試驗平台,開展空間套用、空間科學實驗和技術試驗,以及建設載人空間站奠定基礎、積累經驗。
第二次對接 2011年11月14日20時,在北京航天飛行控制中心的精確控制下,天宮一號與神舟八號成功進行了第二次交會對接。這次對接進一步考核檢驗了交會對接測量設備和對接機構的功能與性能,獲取了相關數據,達到了預期目的。
神九天宮一號對接
2012年6月16日18點37分,神舟九號發射升空,飛行約10分鐘後與火箭分離,進入近地點約200公里、遠地點約330公里的橢圓軌道。6月18日下午14點,神舟九號與天宮一號進行自動交會對接,形成穩定運行的組合體。
2012年6月24日中午,天宮一號與神舟九號成功實施第一次手控交會對接。此次對接任務在航天員劉旺的手動控制下完成,這意味著中國完整掌握空間交會對接技術,具備了建設空間站的基本能力。
手動對接實錄
24日11時08分,北京航天飛行控制中心下達分離指令,神舟九號與天宮一號隨後成功分離。飛船自動撤離至400米左右停泊點。短暫停留後,飛船開始自主接近天宮一號,隨後進入140米保持。
12時38分,飛船轉入手動控制;
12時42分,飛船對接環接觸;
12時50分許,對接機構成功捕獲。
隨著對接鎖鎖緊,天宮一號與神舟九號再次形成一個組合體,手控交會對接順利完成。
神十與天宮一號對接
 從天宮一號上看神舟十號
從天宮一號上看神舟十號 在神舟十號這次中國迄今為止時間最長的太空飛行中,聶海勝、張曉光、王亞平3名航天員,將在太空工作生活15天。神舟十號飛船將先後與天宮一號進行1次自動交會對接和1次航天員手控交會對接。
四種類型
太空飛行器空間交會對接技術的實施必須由高級控制系統來完成,根據航天員及地面站的參與程度可將控制方式劃分為如下四種類型:①遙控操作:追蹤太空飛行器的控制不依靠航天員,全部由地面站通過遙測和遙控來實現,此時要求全球設站或者有中繼衛星協助。
②手動操作:在地面測控站的指導下,航天員在軌道上對追蹤太空飛行器的姿態和軌道進行觀察和判斷,然後動手操作。這是目前比較成熟的方法。
③自動控制:不依靠航天員,由太空飛行器上設備和地面站相結合實現交會與對接。該控制方法也要求全球設站或有中繼衛星協助。
④自主控制:不依靠航天員與地面站,完全由太空飛行器上設備自主實現交會與對接。
從本質上說,上述分類可歸結為人工控制方式或自動控制方式。迄今為止,美國較多地套用人工控制方式,而蘇聯/俄羅斯則主要採用自動控制方式。
用人控來完成太空交會與對接的優點是:可以提高交會與對接的成功率;能及時修正交會系統中的錯誤和排除故障;節省燃料和時間。自控交會與對接的優點是:不需要複雜的生命保障系統,可靠性高,無需考慮人員的安全和救生問題。交會與對接未來的發展趨勢是人控和自控相結合,以提高交會與對接的靈活性、可靠性和成功率。
