力學系統平衡的穩定性
正文
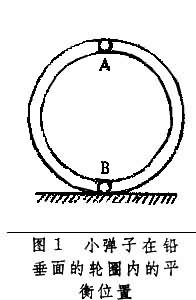
處於平衡位置的某一力學系統,在受到外力系的微小擾動後,仍能繼續處於平衡位置的性質。平衡位置系統的穩定性 當一個力學系統(或機械系統)受外力系的作用而處於平衡時,受到外界的微小擾動後,系統是趨向於回復到平衡位置,則平衡是穩定的;系統越來越遠離平衡位置,則是不穩定。這就是力學系統的平衡穩定性問題。例如小彈子在鉛垂平面內的圓形輪圈內有兩個平衡位置(圖1),即有兩個力學平衡系統。最高點A處是小彈子的不穩定位置;最低點B處是小彈子的穩定位置。圓錐體放在水平面上(圖2), 有三種平衡情況:穩平衡、不穩平衡和中立平衡(或隨遇平衡)。中立平衡的系統在運動過程中重心既不升高也不降低。1644年E.托里拆利已經發現,一個物體系統當其重心處於最低位置時,這系統是穩定的。平衡的穩定性可以看成運動穩定性的特例。
 力學系統平衡的穩定性
力學系統平衡的穩定性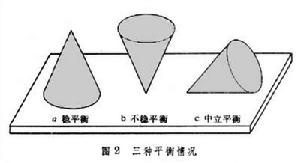 力學系統平衡的穩定性
力學系統平衡的穩定性 ,
,
若在時間t=t0有一擾動,使系統位形產生偏差
 及
及 。如果對於任何ε>0可找出δ=δ(t)>0,使
。如果對於任何ε>0可找出δ=δ(t)>0,使 成立,那么對於一切 t>t0有不等式
成立,那么對於一切 t>t0有不等式 ,則稱這系統在這位置是穩定的,否則稱為不穩定。1788年J.L.拉格朗日發表下列定理:如果一個保守系統的勢能在某個平衡位置是個孤立的極小值,那么這系統在這平衡位置是穩定的(這個定理後來被P.G.L.狄利克雷所證明)。1892年Α.М.里雅普諾夫得到上述定理的一部分逆定理。若保守完整系統的勢能在某平衡位置上是個極大值,則這平衡不穩定。H.Γ.切塔耶夫把上述定理加以擴充為: 若保守系統的勢能在某平衡位置無極小值,則在這位置的平衡是不穩定的。對於非保守系統,如果這系統是在一個保守系統的基礎上再附加一個迴轉儀力而成的,那么上述拉格朗日定理依舊成立,因為迴轉儀力對系統不做功。若附加了耗散力,則使系統的機械能不斷減少,於是這系統的哈密頓函式H對時間的變化率夑不為正。對於 夑為負定函式,而H為正定的情況,拉格朗日定理依舊成立。
,則稱這系統在這位置是穩定的,否則稱為不穩定。1788年J.L.拉格朗日發表下列定理:如果一個保守系統的勢能在某個平衡位置是個孤立的極小值,那么這系統在這平衡位置是穩定的(這個定理後來被P.G.L.狄利克雷所證明)。1892年Α.М.里雅普諾夫得到上述定理的一部分逆定理。若保守完整系統的勢能在某平衡位置上是個極大值,則這平衡不穩定。H.Γ.切塔耶夫把上述定理加以擴充為: 若保守系統的勢能在某平衡位置無極小值,則在這位置的平衡是不穩定的。對於非保守系統,如果這系統是在一個保守系統的基礎上再附加一個迴轉儀力而成的,那么上述拉格朗日定理依舊成立,因為迴轉儀力對系統不做功。若附加了耗散力,則使系統的機械能不斷減少,於是這系統的哈密頓函式H對時間的變化率夑不為正。對於 夑為負定函式,而H為正定的情況,拉格朗日定理依舊成立。 彈性系統的平衡穩定性 工程上的所有結構都不是絕對剛體,因而要考慮強度和剛度問題就必須要研究應力和應變。對於有特殊結構和尺寸的構件,當受力大到某臨界值時,便發生失穩現象,產生較大的有限變形,結構會受到嚴重破壞並造成事故,例如:①受壓桿件。對於桿件受拉力和長度較短的受壓桿件,除非達到強度極限的破壞現象,否則系統總是穩定的。但是,對於細長桿的兩端受到軸向壓力時,當壓力超過臨界力時便發生失穩現象──桿彎成撓曲狀。對於像靜定桁架那樣的結構,如果存在著這樣的壓桿,就像少了一根桿,以致結構變成幾何可變系統而損壞。所以這問題對建築結構和鐵路橋樑的設計是很重要的。②受外壓的薄壁容器。化工廠中內壓較大的薄壁容器的損壞一般是強度不夠的問題。但是,對於外壓大於內壓的薄壁容器,當它的壓力差超過臨界壓力時,便會發生失穩。如薄壁圓筒在筒長和筒徑的比例不當時,筒壁就有可能發生各種不同形式的凹陷而造成破壞。
參考書目
Leonard Meirovitch, Methods of Analytical Dynamics,McGraw-Hill, New York, 1970.
