研究方法
對於含有陀螺儀的系統和雖不含陀螺儀但具有陀螺力的系統,它們的運動方程可以用(第二類)拉格郎日方程描述。在工程技術上,通常套用線性化方程並結合實驗方法和數字仿真技術進行分析。因此,可把描述保守系統的拉格朗日方程的線性近似變換為簡正坐標的形式:
 陀螺穩定性
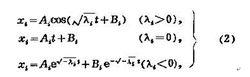
陀螺穩定性這是一個二階常係數線性方程組,式中 x是簡正坐標。方程(1)的零解( x=0, x=0,…, x=0)是系統的平衡狀態。如果取零解為無擾運動,方程(1)即為對應的受擾運動微分方程(見運動穩定性)。將方程(1)積分,可得:
 陀螺穩定性
陀螺穩定性式中 A、 B( i=1,2,…, n)為積分常數。由式(2)可知:當全部λ>0時,平衡狀態穩定;而當有λ=0或λ <0時,則不穩定。因為λ的符號直接影響著平衡狀態的穩定性,所以就稱它們為穩定係數。在λ中取負值的個數稱為不穩定度。當所有穩定係數都不取零值時,就稱平衡狀態是孤立的。
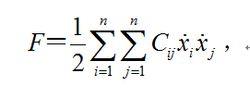
為了進一步研究系統穩定性,還需引進瑞利耗散函式,其函式式為:
 陀螺穩定性
陀螺穩定性式中 C為阻尼係數,為簡正坐標對時間的導數。如果這個二次型函式含有一切簡正坐標的導數(這個函式是正定二次型),就稱為完全耗散:否則就稱為部分耗散。與它們對應的力分別稱為完全耗散力和部分耗散力。
開爾文-泰特-切塔耶夫定理 這是一個有關陀螺力和耗散力對保守系統平衡狀態穩定性影響的定理,它包含下面一些主要結論:如果保守系統的平衡狀態是穩定的(穩定係數皆為正),則當附加陀螺力和部分耗散力(或無耗散力)後,平衡狀態仍然穩定;而當附加陀螺力和完全耗散力後,平衡狀態變為漸近穩定。如果孤立的平衡狀態不穩定(穩定係數皆不為零,且至少有一個為負),則當附加陀螺力和完全耗散力後,平衡狀態仍不穩定。如果孤立的平衡狀態不穩定,且不穩定度是奇數(穩定係數皆不為零,而有奇數個負值),則在附加陀螺力後,平衡狀態仍不穩定。如果不穩定度不是奇數,則當附加適當的陀螺力後,平衡狀態可以變為穩定。因此,對於孤立不穩定的平衡狀態,要實現系統的陀螺穩定,不穩定度應該不是奇數,而且沒有附加的完全耗散力。
上述定理是首先由開爾文和泰特等人提出,後又由切塔耶夫利用里雅普諾夫定理作了嚴格的證明。近年來,這一定理由於在航空和航天中的套用,受到廣泛的重視。雖然定理中用的是線性命題,而且只針對保守系統的孤立平衡狀態,但在一定條件下,有些結論也可以推廣到非線性的情況。可是,對於保守系統的非孤立平衡狀態(此時,有的穩定係數取為零),穩定性問題的分析就比較困難。此外,陀螺力和耗散力對於非保守系統穩定性的影響也值得研究,因為這些問題在新技術中也經常出現。
參考文獻
1、詞條作者:王照林.《中國大百科全書》74卷(第一版)力學 詞條:陀螺儀系統穩定性:中國大百科全書出版社,1987 :485-486頁.
