 AHRS 航姿參考系統
AHRS 航姿參考系統特點
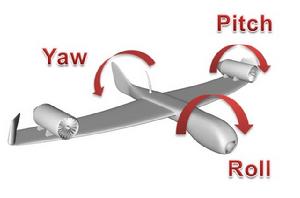
高精度360 度全方位位置姿態輸出,採用歐拉角的會具有萬向鎖,不能全向轉動
高效的數據融合算法快速動態回響與長時間穩定性(無漂移,無積累誤差)相結合
輸出模式
三維全姿態數據(四元數 / 歐拉角 / 鏇轉矩陣)
三維加速度 / 三維角速度 / 三維地磁場強度
套用領域
AHRS 原本起源於飛行器相關技術,但是近幾年隨著成本的器件成本的不斷降低 也被廣泛的套用於機動車輛與無人機,工業設備,攝像與天線雲台,地面及水下設備,虛擬現實,生命運動科學分析等需要三維姿態測量的產品中
參考產品
VM-iVM-i包含三軸陀螺儀、三軸加速度計,三軸電子羅盤等運動感測器,通過內嵌的低功耗處理器輸出加速度,

移與無累計誤差的三維運動姿態數據
ivm-w
iVM-w 是基於MEMS技術的低成本的,高性能的無線慣性三維運動姿態追蹤測量系統
iVM-w可以實時的輸出以四元數、歐拉角表示的零漂移、無累計誤差的三維姿態數據,以及三維空間內的加速度、角速度、地磁場強度等信息,是首個為滿足人體運動科學研究、虛擬現實等需要運動姿態追蹤的無線運動姿態追蹤與測量設備
 iVM-w
iVM-w