
自適應控制的定義
目前關於自適應控制的定義有許多不同的論述,不同的學者根據自己的觀點提出了各自關於自適應控制的定義,這裡對其進行綜合,定義為:在系統運行中,依靠不斷採集控制過程信息,確定被控對象的當前實際工作狀態,最佳化性能準則,產生自適應控制規律,從而實時地調整控制器結構或參數,使系統始終自動地工作在最優或次最優的運行狀態。
自適應控制系統是在模仿生物適應能力的思想基礎上建立的一類可自動調整本身特性的控制系統。其必須完成三個主要功能:①識別受控對象的動態特性;②在識別對象的基礎上選擇決策;③在決策的基礎上做出反應或動作。
交通信號控制方式
經過多年的發展,交通信號控制的方式也發生了很大的變化。從最初的定時控制,發展到車輛感應控制和自適應控制。目前,各個路口採用的交通信號控制系統的方式也主要有這三種,下面分別進行介紹。
(1)定時控制
定時控制是根據歷史交通流數據,人為的預先確定信號機的運行參數。在定時控制中,分為定周期控制與變周期控制。在定周期控制過程中,信號機只有一種控制配時方案,因此信號機全天24個小時只周期的執行這一種運行方案。而在變周期控制過程中,交通警察可以根據當地的實際交通狀態,將全天分為多個時間段,並且為每個時間段可以設定為多種不同的運行方案,每天由時鐘自動選擇、切換運行方案。
(2)車輛感應式控制
在車輛感應式控制方式中,沒有固定的周期和綠信比,信號燈的燈色根據交通路口的交通流量的需要變化而變化,控制方式比較靈活。這種控制方式需要使用感應式信號控制機,通過埋設或懸掛在交叉路口的車輛檢測器獲得車輛信息,然後根據採集到的車輛數據,判斷是否延長特定相位的綠燈間隔時間長度,當然也可以跳過沒有交通需求的相位。在感應式控制中,它包含三個參數:最小綠燈時間、單位延長綠燈時間和最大綠燈時間;同時車輛感應控制又可分為:半感應控制和全感應控制。
(3)自適應控制
自適應控制方式在計算機技術和通信技術發展到一定水平的情況下產生的。它和車輛感應式控制相似,通過檢測器檢測到交通流信息,然後將這些數據實時的通過網路傳到上位機,上位機實時的產生最佳的綠燈配時方案,並付諸實施,可以使一段時間內車輛放行最大,或者使其它交通控制評價指標如延誤、停車次數等最小。這種控制方式適合與區域管理或幹線協調時使用,上位機可以對多個路口信號機進行協調,使其運行方案可以根據交通流的變化而自適應的調整,從而提高整個區域或幹線上的運行效率。
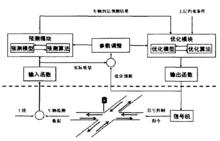
交通信號自適應控制模型
該模型包括物理空間模型和信息空問模型兩個部分。物理空間模型部分山實時交通數據採集系統、真實交通流動態系統以及信號控制策略執行機構組成。信息空間模型部分由交通流預測模組、信一號策略最佳化模組以及線上自適應參數調整模組構成。
物理空間模型中的交通數據採集系統包括各種現有的車輛檢測設備和技術,隨著技術的進步可以逐步添加各種新的檢測手段。該系統的功能是對來自不同數據源的交通數據進行融合過濾,形成控制系統可用的實時交通流特性信息。信號控制策略執行機構負責將控制系統輸出的最佳化信號控制策略轉變為實際的信號燈控制指令並執行。
 自適應信號控制系統
自適應信號控制系統系統架構
交通信號自適應控制系統的架構包括物理架構和邏輯架構兩部分,下面將分別對物理架構和邏輯架構進行介紹。
物理架構
物理架構是指交通信號控制系統各個物理設備的分布以及設備之間如何進行通信等。交通信號自適應控制系統物理架構一般採用三層分散式結構,包括信號控制中心、通信部分和外場部分。
(1)信號控制中心。信號控制中心設備主要包括智慧型交通信號控制系統軟體、中心控制伺服器、區域控制伺服器、通信伺服器、資料庫伺服器等。
(2)通信部分。通信部分主要包括數據通信控制機和通信網路。
(3)外場部分。外場部分設備主要包括信號機、車輛檢測器等,信號機根據車輛檢測器所檢測的交通信息(包括車流量、速度、排隊長度等)調整路日控制方案(信號周期和綠信比),實現路日的有序控制。
中心控制計算機的主要功能是負責監視和協調整個系統的運行,它能夠同時控制多個外部設備。中心監控台可以實時地顯示城市交通情況,輔助工程師進行控制決策,可以進行人機互動傳送指令。動態地圖板可以實時地顯示路網的交通流狀況。信號控制軟體執行交通信號控制程式,對信號機進行遠程控制。數據通信控制機負責中心控制計算機與路口信號機以及其它外接設備的通信。路口信號機通過與檢測器和信號燈相連,可以實時採集交通信息,並將交通信息傳送給自控制計算機,並接受中心控制計算機的指令,來控制交通信號燈。室外情報板可以根據實時的交通流狀況來發布交通誘導信息。
邏輯架構
邏輯架構是指交通信號控制系統內部各個模組之間的組成關係,以及系統提供給外部模組的接口等。邏輯架構應該使得各個模組之間的禍合度儘量低,儘量使得各個模組之間相互獨立,要明確各個模組的功能,各個模組之間通過預留的接口進行協調合作,各個模組的輸入輸出要明確,能夠跟外部的其它系統進行集成。
交通信號自使用控制系統的目標是提高交通路網的利用率,改善城市交通狀況,緩解交通擁堵。由於針對不同的城市區域以及不同的交通狀況,交通控制的目標是不同的,因此本文提出的基於動態優先權的交通信號自適應控制系統採用了多層級的邏輯架構,能夠在不同的層級上選擇合適的控制目標進行協同控制。
單個交叉口的信號控制是最基本的交通信號控制方式。在路口控制層,通過埋設的各種檢測器實時獲取真實的交通流數據,根據採集的真實交通流數據來進行最佳化配時,給出信號配時方案,從而控制路口的交通信號燈。在路口控制層,我們需要根據車輛的到達信息來調整信號控制方案,使得信號控制方案能夠符合交通流的變化。
單個交叉口的交通信號控制只是針對一個交叉口進行獨立的信號控制,它沒有考慮到相鄰路口之間信號控制的影響,比如說沒有考慮當前路口綠燈會對下游路口造成什麼樣的影響。因為我國城市道路上相鄰的交叉日之間的距離相對比較短,如果不考慮相鄰交叉口之間的相互影響,而只是對單個交叉日進行獨立的信號控制是不合理的,甚至會造成整個路網的交通性能下降,單個交叉日的信號控制只能使得路網的局部達到最優的效果,並不能使得整個路網的交通性能最優。因此,交通信號控制系統需要考慮到路網的整體交通狀況,對路網中某一區域內的信號控制進行協同,從而提高路網整體的性能,提高路網吞吐量。在區域控制層,我們需要考慮整個區域內的交通流狀況,給出交叉口之間信號控制的協調方案,保證整個區域的交通暢通,此時不再是根據單個交叉口的交通流做出最佳化配時,而是根據區域內所有交叉口的交通流信息進行協調最佳化,使得信號配時能夠適應交通流的變化。
存在的問題
交通流預測中的不確定性
自適應交通控制策略主要依賴於到達交通流的預測。這裡有兩種預測。一種是基於測量到的實時數據,來預測檢測到車輛的移動,另一種是基於歷史數據來預測未來的車流。前一種稱為估計,後一種稱為預測。長期最佳化是為了達到全局最優,基於實時數據的控制依賴於許多短期最佳化來減少交通需求中的不確定性,並提高計算的準確性。比如,RHODES中使用的COF算法根據上游檢測器位置每隔30到40秒來最佳化相位順序。OPAC策略基於過去的50到100秒,所以他的有效性依賴於交通流預測的精確性。不論交通信息是如何獲得的,預測和實際數據間必然會有一定差距。所以,一個理想的自適應控制策略應該儘可能減少對預測的依賴。
旅行時間估計的困難
一個可靠的估計模型必須能夠為自適應控制提供可靠的實時交通信息。車輛到達信息通常通過在上游路日設定的檢測器獲取,而估計得目標是獲取_卜游檢測器到路口停車線的車輛旅行時間。對於系統最佳化來說,理想的情況是估計一段較長時間的交通情況,但是由於地理的限制和車輛到達的不確定性,在估計時間和真實數據之間總是會有誤差。
缺少自調節機制
自適應控制策略的有效性同樣依賴於一些系統參數的合理估計,包括佇列形成和消散,啟動延誤,車輛消散率。啟動延誤和車輛消散率會受到很多因素的影響,比如道路施工、交通事故甚至天氣原因等等。這些差距在模型使用靜態參數時無法體現出來,然後積累的錯誤會導致足夠大的系統偏差。事實上,大部分現有的自適應控策略沒有自調節的功能。
