
基本概念
“自適應”一般是指系統按照環境的變化,調整其自身使得其行為在新的或者已經改變了的環境下達到最好的或者至少是容許的特性和功能,這種對環境變化具有自適應能力的系統稱為自適應系統。
在反饋控制和最優控制中,都假定被控對象或過程的數學模型是已知的,並且具有線性定常的特性。實際上在許多工程中,被控對象或過程的數學模型事先是難以確定的,即使在某一條件下被確定了的數學模型,在工況和條件改變了以後,其動態參數乃至於模型的結構仍然經常發生變化。在發生這些問題時,常規控制器不可能得到很好的控制品質。為此,需要設計一種特殊的控制系統,它能夠自動地補償在模型階次、參數和輸入信號方面非預知的變化,這就是自適應控制。
分類
自從50年代末期由美國麻省理工學院提出第一個自適應控制系統以來,先後出現過許多不同形式的自適應控制系統。主要有:
(1)增益自適應控制
(2)模型參考自適應控制(MRAC)
(3)自校正控制(STC)
(4)直接最佳化目標函式自適應控制
(5)模糊自適應控制
(6)多模型自適應控制
(7)自適應逆控制
模型參考自適應控制(model reference adaptive system,MRAS)和自校正控制系統(self-tuning control system)是目前比較成熟的兩類自適應控制系統。這類自適應系統的一個主要特點是線上辨識對象數學模型的參數,進而修改控制器的參數 。
模型參考自適應控制系統
這類自適應控制系統設計方法的理論基礎為局部參數最佳化方法、李雅普諾夫穩定性理論和波波夫(Popov)超穩定性理論。
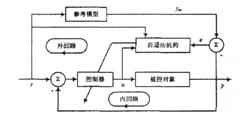
模型參考白適應控制系統由參考模型、被控對象、反饋控制器和調整控制器參數的自適應機構等部分組成,其基本原理如圖1所示。這類控制系統包括內迴路和外迴路兩個迴路。內環是由被控對象和控制器組成的普通反饋迴路,而控制器的參數則由外迴路調整。參考模型的輸出 直接表示了對象輸出應當怎樣理想地回響參考輸人信號r。
 自適應系統
自適應系統圖1
控制器參數的自適應調整過程如下:
 自適應系統 自適應系統
自適應系統 自適應系統 自適應系統
自適應系統當參考輸入r(t)同時加到系統和模型的入口時,由於對象的初始參數未知,控制器的初始參數不可能整定得很好。故一開始,運行系統的輸出回響y(t)與模型的輸出回響 是不可能完全一致,結果將產生偏差信號e(t),故可由e(t)驅動自適應機構來產生適當調節作用,直接改變控制器的參數,從而使系統的輸出 y(t)逐步與模型輸出 接近,直到 為止,當e(t)=0後,自適應調整過程就自動停止,控制器參數也就自動整定完畢。
自校正控制系統(STC)
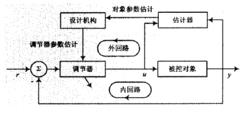
自校正控制系統可以構想由兩個環路組成,其典型結構如圖2所示。
 自適應系統
自適應系統圖2
該調節器的內環包括被控對象和一個普通的線性反饋調節器,外環則由一個遞推參數估計器和一個設計機構所組成,其任務是辨識過程參數,再按選定的設計方法綜合出控制器參數,用以修改內環的控制器。這類系統的特點是必須對過程或者被控對象進行線上辨識(估計器),然後用對象參數估計值和事先規定的性能指標線上綜合出調節器的控制參數,並根據此控制參數產生的控制作用對被控對象進行控制。經過多次地辨識和綜合調節參數,可以使系統的性能指標趨於最優。
在目前的自校正控制系統中,用來綜合自校正控制律的性能指標有兩類:最佳化性能指標和常規性能指標。前者如最小方差、LQG和廣義預測控制;後者如極點配置和PID控制;用來進行參數估計的方法有最小二乘法、增廣矩陣法、輔助變數法和最大似然法。
套用
模型參考自適應控制系統的套用
MRAC系統過去套用最成功的領域之一是電力拖動領域。例如,最早套用的是Courtial和Landau對晶閘管供電直流電力拖動系統進行的自適應控制。南於使用常規的PI調節器進行速度反饋控制不能保證要求的高性能指標,而採用自適應控制方案可將對象近似為二階系統,且只調兩個參數就能保證對象參數變化時性能指標不變,並能克服電機速度過零時,PI調節器不能解決的死區問題。
MRAC技術在自動機上套用也很活躍,可基本上解決自動機的非線性和自由度間的干擾問題。MRAC技術在船舶自動駕駛方面套用也很成功,它可將非線性模型簡化為二階線性模型,這樣,當外界環境(風力,波浪,水流等)變化,使船的動力特性隨吃水差、負載和水深而改變時,採用自適應控制的自動駕駛儀就可達到要求的性能,操作安全可靠。另外,MRAC技術在其他領域也有套用,諸如內燃機,吹氧煉鋼爐,液壓伺服系統等。
自校正控制系統的套用
目前自校正控制系統套用要比MRAC多得多,除造紙、化工、二氧化鈦窯、水泥工業、礦石粉碎、單晶爐圓筒鍋爐等外,在超級遊輪自動駕駛和船舶自動駕駛克服隨機干擾,如風、浪、潮流、速度、負載及水深等方面效果也很好。同時,在原子能工業、機器人和人工心臟等部門中的套用也不乏成功的例子。
存在的問題
穩定性問題
穩定性問題是一切控制系統的核心問題。設計自適應控制系統應以保證系統全局穩定為原則。現已發現現有的穩定性理論還不能處理已提出的一些自適應控制問題,尚需建立一種新的穩定性理論體系M。
收斂性問題
當一個自適應控制算法被證明是收斂時,它可以提高這個算法在實際套用中的可信度。由於自適應算法的非線性特性對建立收斂理論帶來較大的困難,目前只在有限的幾類簡單的自適應控制算法中取得了一定的結果。而且現有的收斂性結果的局限性太大,假設條件限制太嚴,不便於實際套用,即便是保證參數估計收斂的最基本要求,對於實際系統也不一定總能滿足。收斂性的理論研究還有待進一步深入。
魯棒性問題
在存在擾動和未建模動態特性的條件下,系統能保證其穩定性和一定動態性能的能力稱之為自適應控制系統的魯棒性。擾動能使系統參數產生嚴重漂移,導致系統的不穩定,特別是在存在未建模的高頻動態特性的條件下,若指令信號過大或含有高頻成分,或存在高頻噪聲,或自適應增益過大,都可能使自適應控制系統喪失穩定性。目前,已提出若干不同方案來克服上述原因導致的不穩定,但還遠不能令人滿意。今後一個重要的理論研究課題就是要設計一個魯棒性強的自適應控制系統。
性能和穩定性問題
一個自適應控制系統的很好工作,不僅要求所設計的系統穩定,而且要滿足一定的性能指標要求。由於自適應控制系統是非線性時變系統,初始條件的變化或未建模,其動態存在都勢必要改變系統的運動軌跡。因此,分析自適應控制系統的動態品質是極其困難的。目前,這方面成果還很少見 。
