
穩態誤差的分類
 穩態誤差
穩態誤差穩態誤差按照產生的原因分為原理性誤差和實際性誤差兩類。
原理性誤差
 穩態誤差
穩態誤差通常,伺服系統為無靜差系統,而自動調節系統為有靜差系統。對於無靜差系統,無靜差性是相對於某種特定形式的輸入信號或擾動作用而言的。一個控制系統對於單位階躍函式(見拉普拉斯變換)的輸入信號或擾動作用是無靜差的,並不表示它對單位斜坡函式的輸入或擾擾動也是無靜差的。對於同時有輸入r(t)和擾動n(t)作用的控制系統(見圖),在系統為漸近穩定(見穩定性)的前提下,原理性誤差ess規定為t→∞時控制誤差e(t)的值。ess由兩部分組成,一部分是由輸入信號引起的穩態誤差esr,另一部分是由擾動作用引起的穩態誤差esn,即ess=esr+esn。用G1(s)、G2(s)、H(s)分別表示系統各部分的傳遞函式,並令G(s)=G1(s)G2(s)為系統前饋通道的傳遞函式,則系統穩態誤差與系統傳遞函式間的關係為
 穩態誤差
穩態誤差其中R(s)和N(s)分別是輸入r(t)和擾動n(t)的拉普拉斯變換,s為複數自變數。
實際性誤差
系統的組成部件中的不完善因素(如摩擦、間隙、不靈敏區等)所造成的穩態誤差。
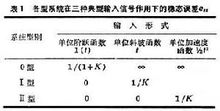
系統的結構類型在控制系統的研究中,常常按系統組成中所包含的積分環節的個數對系統進行分類,這對研究不同典型輸入作用下系統的穩態誤差是很方便的。系統前饋通道中不包含積分環節時稱為0型系統,包含一個積分環節時稱為Ⅰ型系統,包含兩個積分環節時稱為Ⅱ型系統。高於Ⅱ型的系統一般沒有實際意義,這種結構的控制系統很難具有滿意的過渡過程性能,在工程上幾乎不採用。表1為各型控制系統在三種典型輸入信號(單位階躍函式1(t)、單位斜坡函式t、單位加速度函式t2)作用下的穩態誤差ess,其中K 表示系統的開環增益。
 穩態誤差
穩態誤差穩態誤差
靜態誤差係數在控制系統的分析中,通常採用靜態誤差係數作為衡量系統穩態性能的一種品質指標,靜態誤差係數能表征系統所具有的減小或消除穩態誤差的能力。靜態誤差係數越大,系統的穩態誤差就越小;當靜態誤差係數為∞時,系統沒有穩態誤差。靜態誤差係數包括位置誤差係數Kp、速度誤差係數Kv、加速度誤差係數Ka。
用G(s)H(s)表示控制系統的開環傳遞函式,則三種誤差係數與G(s)H(s)的關係為
 穩態誤差
穩態誤差$$Kp=【G(s)H(s)】S=0
Kv=【sG(s)H(s)】S=0
 穩態誤差
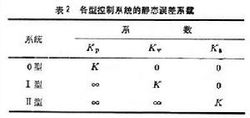
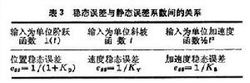
穩態誤差Ka=【s^2G(s)H(s)】S=0!! 表2為各型控制系統的靜態誤差係數值。表3為三種典型輸入信號作用下系統穩態誤差和靜態誤差係數間的關係,其中K 為系統的開環增益。
 穩態誤差
穩態誤差