
簡介
 球面四桿結構
球面四桿結構組成
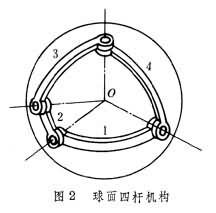
空間連桿機構常指單自由度空間閉鏈機構,但是隨著工業機器人和假肢技術的發展,多自由度空間開鏈機構也有不少用途。單自由度單環平面連桿機構只含4個轉動副,而單自由度單環空間連桿機構所含轉動副應為7個,此即空間七桿機構。空間連桿機構中採用多自由度的運動副如球面副或圓柱副時,所含構件數即可減少而形成簡單穩定的空間四桿機構或三桿機構。為了表明空間連桿機構的組成類型,常用R、P、C、S、H分別表示轉動副、移動副、圓柱副、球面副、螺鏇副。一般空間連桿機構從與機架相連的運動副開始,依次用其中的一些符號來表示。常用空間四桿機構的組成類型有RSSR、RRSS、RSSP和RSCS機構。這些機構因含有兩個球面副,結構比較簡單,但繞兩球心連線自由轉動的局部自由度影響高速性能。所有轉動副軸線匯交一點的球面四桿機構, 也是一種套用較廣的空間連桿機構,如萬向聯軸節機構。此外,還有某些特殊空間連桿機構,如貝內特機構,其運動副軸線夾角和構件尺度要求滿足某些特殊關係。運動分析
空間連桿機構的分析綜合均較平面連桿機構複雜困難,這在很大程度上影響空間連桿機構的推廣套用。研究空間連桿機構的方法有以畫法幾何為基礎的圖解法和運用向量、對偶數、矩陣和張量等數學工具的解析法。圖解法有一定的局限性,套用較多的是便於電子計算機運算的解析法。空間連桿機構分析中重要而又困難的問題是位移分析。對多於4桿的空間連桿機構,由輸入求輸出位移時因中間運動變數不易避開或消去,一般要用數值疊代法聯解多個非線性方程式或求解高次代數方程式。對最難進行位移分析的空間7R機構,由輸入求輸出位移的代數方程式高達32次。
基本問題
對空間連桿機構進行運動綜合的基本問題是:①當主動件運動規律一定時,要求連架從動件能按若干對應位置或近似按某函式關係運動;②要求連桿能按若干空間位置姿態運動而實現空間剛體的導引;③要求連桿上某點能近似沿給定空間曲線運動。由於這些問題和平面連桿機構的綜合問題相仿,所以平面的巴默斯特爾理論可解析地推廣於空間剛體的導引問題和其他運動綜合問題。此外尚有利用機構封閉性等同條件建立設計方程式和採用最佳化技術等綜合方法。
