
比例(P)控制
控制器的輸出信號m(t)能夠成比例地反應其輸入信號e(t)。用數學式表達,即:m(t)=kpe(t)。式中,kp為比例係數。
P控制器實質上是一個具有可調增益的放大器。在信號變換過程中,P控制器只改變信號的增益而不影響其相位。在串聯校正中,加大控制器增益Kp,可以提高系統的開環增益,減小系統穩態誤差,從而提高系統的控制精度,但會降低系統的相對穩定性,甚至可能造成閉環系統不穩定。因此,在系統校正設計中,很少單獨使用比例控制規律。
將比例控制與其他控制結合
比例控制與積分控制結合(PI控制)
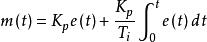
具有比例-積分控制規律的控制器,稱PI控制器,其輸出信號m(t)同時成比例地反應輸入信號e(t)及其積分,即
 比例控制
比例控制,
式中,Kp為可調比例係數;Ti為可調積分時間常數。
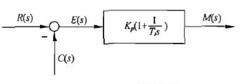 PI控制器
PI控制器在串聯校正時,PI控制器相當於在系統中增加了一個位於原點的開環極點,同時也增加了一個位於s左半平面的開環零點。位於原點的極點可以提高系統的型別,以消除或減小系統的穩態誤差,改善系統的穩態性能;而增加的負實零點則用來減小系統的阻尼程度,緩和PI控制器極點對系統穩定性及動態過程產生的不利影響。只要積分時間常數Ti足夠大,PI控制器對系統穩定性的不利影響可大為減弱。在控制工程實踐中,PI控制器主要用來改善控制系統的穩態性能。
比例控制與微分控制結合(PD控制)
具有比例——微分控制規律的控制器,稱為PD控制器,其輸出m (t)與輸入e(t)的關係如下式所示:
 比例控制
比例控制 比例控制 比例控制
比例控制 比例控制式中,Kp為比例係數; 為微分時間常數。Kp與 都是可調的參數。
 比例控制
比例控制PD控制器中的微分控制規律,能反應輸入信號的變化趨勢,產生有效的早期修正信號,以增加系統的阻尼程度,從而改善系統的穩定性。在串聯校正時,可使系統增加一個 的開環零點,使系統的相角裕度提高,因而有助於系統動態性能的改善。
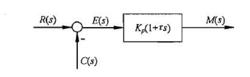 PD控制器
PD控制器比例、積分、微分控制結合(PID控制)
具有比例-積分-微分控制規律的控制器,稱PID控制器。這種組合具有三種基本規律各自的特點,其運動方程為
 比例控制
比例控制相應的傳遞函式為
 比例控制
比例控制與PI控制器相比,PID控制器除了同樣具有提高系統的穩態性能的優點外,還多提供一個負實零點,從而在提高系統動態性能方面,具有更大的優越性。因此,在工業過程控制系統中,廣泛使用PID控制器。PID控制器各部分參數的選擇,在系統現場調試中最後確定。通常,應使I部分發生在系統頻率特性的低頻段,以提高系統的穩態性能;而使D部分發生在系統頻率特性的中頻段,以改善系統的動態性能。
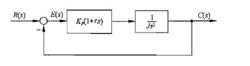 比例-微分控制系統
比例-微分控制系統比例控制技術
比例控制技術是實現元件或系統的被控制量(油液的壓力、流量等) 與控制量(電氣信號) 之間線性關係的技術手段,它彌補了電液伺服控制套用和維護條件苛刻、成本高、能耗大以及傳統的電液開關控制性能差等缺陷,很好地滿足了工程實際的需要並得到迅速的發展。
