
理論簡介
經典控制理論在實際控制系統中的典型套用就是PID控制器。在早期的控制系統中,PID控制也是唯一的自動控制方式。伴隨著計算機技術的發展,現代控制理論在實用性方面獲得了很大進展,解決了許多經典控制理論不能解決的問題。這一現象使很多人認為,新的理論和技術可以取代PID控制。但後來的發展說明,PID控制並沒有讓位。目前,PID控制仍然是在工業控制中套用得最為廣泛的一種控制方法。其原因是:(1)其結構簡單,魯棒性和適應性較強;(2)其調節整定很少依賴於系統的具體模型;(3)各種高級控制在套用上還不完善;(4)大多數控制對象使用常規PID控制即可以滿足實際的需要;(5)高級控制難以被企業技術人員掌握 。
但由於實際對象通常具有非線性、時變不確定性、強幹擾等特性,套用常規PID控制器難以達到理想的控制效果;在生產現場,由於參數整定方法繁雜,常規PID控制器參數往往整定不良、性能欠佳。這些因素使得PID控制在複雜系統和高性能要求系統中的套用受到了限制 。
控制原理
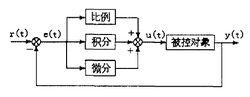 圖1 PID控制系統原理框圖
圖1 PID控制系統原理框圖常規PID控制系統原理如圖1所示,這是一個典型的單位負反饋控制系統。系統由PID控制器和被控對象組成。
控制規律
PID控制器是一種線性控制器,它根據給定值r(t)與實際輸出值c(t)構成偏差:e(t)=r(t)-c(t)。將偏差的比例(P)、積分(I)和微分(D)通過線性組合構成控制量,對受控對象進行控制。其控制規律為:
 比例積分微分控制
比例積分微分控制 比例積分微分控制
比例積分微分控制傳遞函式為: ,式中,Kp為比例係數,Ti為積分時間常數,Td為微分時間常數;Ki=Kp/Ti,為積分係數;Kd=Kp*Td,為微分係數。
各環節作用
PID控制器各校正環節的作用如下:
比例環節:即時成比例地反應控制系統的偏差信號e(t),偏差一旦產生,控制器立即產生控制作用以減小誤差。當偏差e=0時,控制作用也為0。因此,比例控制是基於偏差進行調節的,即有差調節。
積分環節:能對誤差進行記憶,主要用於消除靜差,提高系統的無差度,積分作用的強弱取決於積分時間常數Ti,Ti越大,積分作用越弱,反之則越強。
微分環節:能反映偏差信號的變化趨勢(變化速率),並能在偏差信號值變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減小調節時間。
從時間的角度講,比例作用是針對系統當前誤差進行控制,積分作用則針對系統誤差的歷史,而微分作用則反映了系統誤差的變化趨勢,這三者的組合是“過去、現在、未來”的完美結合 。
性能指標
 比例積分微分控制
比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制
比例積分微分控制衡量一個PID控制系統性能好壞的指標主要有:上升時間 、超調量 、調節時間 和穩態誤差 。其中:
比例積分微分控制(1)上升時間 是指系統實際輸出從正常輸出的10%上升到正常輸出的90%時所需的時間;
 比例積分微分控制
比例積分微分控制(2)調節時間 是指系統實際輸出值穩定在正常輸出值的5%或2%範圍以內時所需的時間;
比例積分微分控制(3)超調量 是指系統實際輸出的最大值與正常值的差與正常值的比值;
比例積分微分控制(4)穩態誤差 是指系統達到穩態時的輸出值與正常值差的絕對值與正常值的比值。
這四個參數反映了系統的回響能力和穩定性,通過它們就可以判定一個系統性能的好壞 。
參數選取
長期以來,在設計和套用PID控制器的過程中,PID參數的選取一直是一個難題,這是因為:
(1)比例作用使得控制器的輸入輸出成比例關係,為了儘量減小偏差,同時也為了加快回響速度,縮短調節時間,就需要增大Kp。但比例作用過大會使系統動態性能變壞,甚至會使閉環系統不穩定。
(2)積分作用的引入有利於消除穩態誤差,但使系統的穩定性下降。尤其在大偏差階段的積分往往會使系統產生過大的超調,調節時間變長。
(3)微分作用的引入使系統能夠根據偏差變化的趨勢做出反應,適當的微分作用可加快系統回響,有效地減小超調,改善系統的動態特性,增加系統的穩定性。不利之處是微分作用對干擾敏感,使系統抑制干擾能力降低。
因此,PID控制器的參數選取必須兼顧動態與靜態性能指標要求,只有合理地整定Kp、Ki、Kd三個參數,才能獲得比較滿意的控制性能 。
整定方法
所謂PID控制器參數整定就是設定和調整控制器的參數,使控制系統的過渡過程達到滿意的品質。參數整定方法主要有以下幾類:基於被控過程對象參數辨識的整定方法,這種方法首先要辨識出對象的參數模型,再利用極點配置整定法、相消原理法等理論計算整定法整定;基於抽取對象輸出回響特徵參數整定法,如Z-N參數整定法(也稱臨界比例度法);參數最佳化方法;基於模式識別的專家系統法以及基於控制器自身控制行為的控制器參數線上整定方法。下面介紹幾種常用的整定方法。
湊式法
所謂湊試法是先將調節器的參數根據經驗設定在某一數值上,然後在閉環系統中加擾動,觀察過渡過程的曲線形狀,若曲線不夠理想,則以調節器P、I、D參數對系統過渡過程的影響為依據,按照先比例,後積分,最後微分的順序,將調節器參數逐個進行反覆湊試,知道獲得滿意的控制質量。
具體步驟如下:
 比例積分微分控制
比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制(1)置調節器積分時間 ,微分時間 ,在比例度 按經驗設定的初始條件下,將系統投入運行,整定比例度 。若曲線振盪頻繁,則加大比例度 ;若曲線超調量大,且趨於非周期過程,則減小比例度 ,求得滿意的4:1過渡過程曲線。
比例積分微分控制 比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制(2)引入積分作用〔此時將上述比例度 增大1.2倍〕。將界由大到小進行整定。若曲線波動較大,則應增大積分時間 ;若曲線偏離給定值後長時間回不來,則需減小 ,以取得較好的過渡過程曲線。
 比例積分微分控制
比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制(3)若需引入微分作用,則將 按經驗值或按 設定,並由小到大加入。若曲線超調量大而衰減慢,則需增大 ;若曲線振盪厲害,則應減小 。觀察曲線,適當調整比例度 和 ,直到求得滿意的過渡過程曲線。
臨界比例度法(Z-N法)
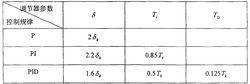 圖2
圖2 比例積分微分控制
比例積分微分控制 比例積分微分控制
比例積分微分控制本方法是由齊格勒(Ziegler)和尼柯爾斯(Nichols)提出的一種PID參數工程整定方法。這種方法是基於閉環回響的方法,在閉合的控制系統里,將調節器置於純比例作用下,從大到小逐漸改變調節器的比例度,得到等幅振盪的過渡過程,此時的比例度稱為臨界比例度,用 表示,相鄰兩個波峰間的時間間隔,稱為臨界振盪周期,用 表示,通過計算即可求出調節器的整定參數。這種方法基於頻率回響的分析。其步驟如下:
比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制(1)將調節器的積分時間 置於最大( ),微分時間 置零( ),比例度 適當,將系統投入運行。
比例積分微分控制 比例積分微分控制 比例積分微分控制(2)將比例度 逐漸減小,得到等幅振盪過程,記下臨界比例度 和臨界振盪周期 值。
比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制 比例積分微分控制(3)根據 、 值,採用圖2中的經驗公式,計算出調節器各個參數,即 、 、 的值。
衰減曲線法
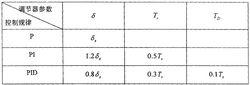 圖3
圖3衰減曲線法是在總結臨界比例度法的基礎上,經過反覆實驗提出來的。其具體的整定步驟如下(以4:1衰減過程為例,10:1衰減過程類似):
 比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制 比例積分微分控制
比例積分微分控制 比例積分微分控制
比例積分微分控制(1)先把過程控制系統中調節器參數置成純比例作用 ,使系統投入運行,再把比例度 從大到小逐漸調小,直到出現所要求的4:1衰減過程曲線,此時的比例度為4:1衰減比例度 ,兩個相鄰波峰間的間隔稱為4:1衰減振盪周期 。
比例積分微分控制 比例積分微分控制2、根據 、 使用圖3所示公式,即可計算出調節器的各整定參數值。
3、按“先P後I最後D”的操作程式,將所求得的整定參數設定在調節器上。再觀察運行曲線,若不太合理,可做適當調整。
以上介紹了幾種常用的PDI控制器參數整定方法,除上述方法外,還有多種整定方法,如過程反應曲線法,又稱C-C法:繼電型PID自整定方法,它的基本思想是在控制系統中設定兩種模態:測試模態和調節模態。在測試模態,由一個繼電非線性環節來測試系統的振盪頻率和增益,而在調節模態下,由系統的特徵參數首先得出PID控制器,再通過此控制器調節系統的動態性能。如果系統的測試發生變化,則需要重新進入測試模態進行測試,測試完成之後在回到調節模態進行控制;此外,還有基於增益最佳化的整定法、基於總和時間常數的整定法和基於交叉兩點法、ISTE最優設定法等 。
