
內容
在微分(D:differential)控制中,控制器的輸出與輸入誤差信號的微分(即誤差的變化率)成正比關係,微分的作用足能夠超前調節。
自動控制系統在克服誤羞的調節過程中可能會出現振盪甚至失穩。其原因是由於存在有較大慣性組件(環節)或有滯後(delay)組件,具有抑制誤差的作用,其變化總是落後於誤差的變化。解決的辦法是使抑制誤差的作用的變化“超前”,即在誤差接近零時,抑制誤差的作用就應該是零。
這就是說,在控制器中僅引入“比例”項往往是不夠的,比例項的作用儀足放大誤差的幅值,而目前需要增加的是“微分項”,它能預測誤差變化的趨勢,這樣具有“比例+微分”的控制器,就能夠提前使抑制誤差的控制作用等於零,甚至為負值,從而避免了被控量的嚴重超調。所以對有較大慣性或滯後的被控對象,比例微分(PD)控制。即“比例(P)+微分(D)”控制器能改善系統在調節過程中的動態特性。
規律
對於慣性較大的對象,為了使控制及時,常常希望能根據被控變數變化的快慢來控制。在人工控制時,雖然偏差可能還小,但看到參數變化很快,估計很快就會有更大偏差,此時操作人員會過分地改變閥門開度以克服干擾的影響,這就是按偏差變化速度進行控制。在自動控制中,這就要求控制器具有微分控制規律,就是控制器的輸出信號與偏差信號的變化速度成正比,即
 比例微分控制
比例微分控制 比例微分控制
比例微分控制式中 ——微分時間常數;
 比例微分控制
比例微分控制式中 ——偏差信號變化速度。
 比例微分控制 比例微分控制
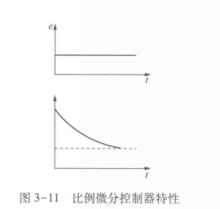
比例微分控制 比例微分控制此式表示理想微分控制器的特性.若在 時輸入一個階躍信號,則在 時刻控制器輸出將為無窮大,其餘時間輸出為零。這種控制器用在系統中,即使偏差很小,只要出現變化趨勢,馬上就進行控制,故有提前控制之稱,這是它的優點。但它的輸出不能反映偏差的大小,假如偏差固定,即使數值很大,微分作用也沒有輸出,因而控制結果不能消除余差,所以不能單獨使用這種控制器,它常與比例或比例積分組合構成比例微分(PD)或比例微分積分(PID)控制器。
 比例微分控制
比例微分控制比例微分控制規律為:
 比例微分控制 比例微分控制 比例微分控制
比例微分控制 比例微分控制 比例微分控制微分作用按偏差的變化速度進行控制,其作用比比例作用快,因而對慣性大的對象用比例微分控制規律可以改善控制質量,減小最大偏差,節省控制時間。微分作用力圖阻止被控變數的變化,有抑制振盪的效果,但如果加得過大,由於控制過強,反而會引起被控變數大幅度的振盪。微分作用的強弱由微分時間常數來決定, 越大,微分作用越強, 越小,微分作用越弱。
 比例微分控制
比例微分控制特點
相對比例控制作用而言,微分控制有超前作用,即當e作階躍變化時,輸出會出現跳躍,加大了幾倍調節作用。因此,要想得到與比例作用同樣的調節效果,採用比例微分控制,就可縮短所需時間。微分作用與偏差變化率成比例,即它是根據偏差變化趨勢產生控制作用,因而有“預先控制”的性質。俗稱超前調節。微分作用的超前特性,只對廣義對象的容量滯後有效。而對很大的純滯後無效。
比例微分控制引入過強的微分作用也會降低系統穩定程度,增加振盪趨向,所以 應選用合理。
適用場合
從實際使用情況看,單純的比例微分控制用得較少,在生產上用得較多的是比例、積分和微分三種規律結合起來的PID控制。
