
自由度計算
在平面機構中,兩構件通過運動副連線後,使構件獨立運動受到了限制,自由度隨之減少。對獨立運動所加的限制稱為約束。不同類型的運動副引人的約束不同,所保留的自由度也不同。每個低副引入約束數為2,高副的約束數為1。例如轉動副,約束了兩個移動自由度,保留了一個轉動自由度;而移動副約束了沿某一軸方向的移動和平面內轉動兩個自由度,保留了沿另一軸方向移動的自由度;如高副則只約束了沿接觸點公法線方向移動的自由度,保留繞接觸點轉動和沿接觸點公切線方向移動兩個自由度。
機構能產生獨立運動的數目稱為機構的自由度。在平面機構中,各構件只作平面運動。所以每個自由構件具有3個自由度。而每個平面低副引入2個約束,每個高副引入1個約束。設平面機構中共有n個活動構件(機架不是活動構件),在各構件尚未構成運動副時,它們共有3n個自由度。而當各構件構成運動副後,設共有P個低副和P個高副,則機構將受到2P+P個約束,故機構的自由度為:
 平面機構的自由度
平面機構的自由度機構具有確定運動的條件
機構的自由度也就是機構所具有的獨立運動的個數。由前述可知,從動件是不能獨立運動的,只有原動件才能獨立運動。通常原動件都與機架相連,具有一個獨立運動(轉動或移動),是由外界給定的。為了使機構具有確定的運動,機構自由度應大於零,且機構的原動件的數目應等於機構的自由度的數目。這就是機構具有確定運動的條件。當機構不滿足這一條件時,如果機構的原動件數小於機構的自由度,機構的運動不能確定。如果原動件數大於機構的自由度,機構不能產生運動,並將導致機構中最薄弱環節的損壞。
計算平面機構自由度應注意的事項
在計算平面機構自由度時,應注意下述幾種情況。
複合鉸鏈
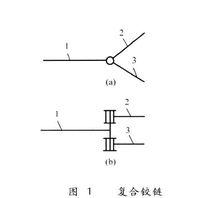 圖 1 複合鉸鏈
圖 1 複合鉸鏈兩個以 上的構件同時在一處以轉動副相連線就構成複合鉸鏈。如圖1(a)所示三個構件組成的複合鉸鏈,從圖1(b)可以看出,它實際為兩個轉動副。依此類推m個構件組成的複合鉸鏈應具有(m-1)個轉動副。
局部自由度
在有些機構中,某些構件所能產生的局部運動,並不影響其他構件的運動。我們把這些構件所能產生的這種局部運動的自由度稱為局部自由度。如圖2(a)所示的滾子椎桿凸輪機構中,為了減少高副元素的磨損,在推桿3與凸輪1之間裝了一個滾子2。此時在該機構中n=3,P=3,P=1。其自由度為
 平面機構的自由度
平面機構的自由度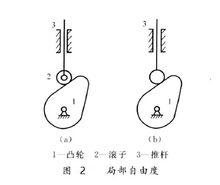 圖 2 局部自由度
圖 2 局部自由度但是,滾子2繞其自身軸線的轉動,並不影響其他構件的運動,因而它只是一種局部自由度。因為如圖2(b)所示,如構想將滾子2和推桿3焊在一起,顯然並不影響其他構件的運動。但此時該機構卻變為n=2,P=2,P=1而其白由度為
 平面機構的自由度
平面機構的自由度由此可見,可以認為該機構的實際自由度為1。這就是說,在計算機構的自出度時,應將機構中的局部自由度除去不計。
虛約束
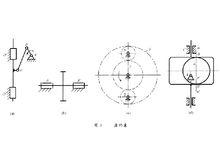 圖 3 虛約束
圖 3 虛約束在運動副引 人的約束中,有些約束對機構自由度的影響是重複的。這些對機構運動不起限制作用的重複約束稱為虛約束或消極約束,在計算機構自由度時應將虛約束除去不計。
平面機構中的虛約束常出現下列場合:
①兩個構件組成若干個導路中心線互相平行或重疊的移動副,只能算一個移動副,如圖3(a)所示。
②兩個構件組成若干軸線互相重合的轉動副,只能算一個轉動副,如圖3(b)所示。
③機構中對運動不起獨立作用的對稱部分。如圖3(c)所示輪系,採用齒輪2和齒輪2’對稱布置形式,實際上只要齒輪2就能滿足運動要求。齒輪2並不影響機構的運動,故其帶來的約束為虛約束。
④如兩構件在多處接觸而構成平面高副,且各接觸點處的公法線彼此重合,只能算一個平面高副,如圖3(d)所示。
⑤當機構中有兩個構件相連線時,若它們連線點的軌跡在未組成運動副以前就是相互重合的,則此連線形成的運動副就只構成虛約束。
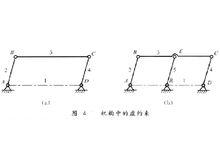 圖 4
圖 4 平面機構的自由度
平面機構的自由度圖4(a)是一平行四邊形機構,若構件2為主動件且作轉動時,構件4也將以D點為圓心轉動,而構件3將作平移。它上面各點的軌跡均為圓心在AD線上、半徑為AB長的圓周。該機構的自由度
若在機構上再加一個構件4(b),它與構件2和構件4平行而等長,顯然,加上構件5後對整個構件的運動並無影響,但此時機構的自由度卻為
 平面機構的自由度
平面機構的自由度機構自由度數為零意味著機構不能運動,顯然與實際情況不符。這是因為加了一個構件5和兩個轉動副,即增加3個自由度並引人4個約束,於是減少了機構的1個自由度,但構件3和構件5上的E點在未形成運動副前均作圓周運動,圓周半徑均為ER,圓心為R。所以兩者軌跡重合,而這多出的一個約束對機構的運動並不起約束作用,因此為虛約束。計算自由度時應將那些從機構運動的角度看來是多餘的構件及其帶入的運動副去掉。
虛約束對運動雖不起作用,但可以增加構件的剛性和使構件受力均衡,所以實際機械中虛約束隨處可見。只有將機構運動簡圖中的虛約束排除,才能算出真實的機構自由度。
