
組成要素
構件及其類型
構件是機構彼此相對運動的運動單元體。一個構件可以是一個單獨製造的零件,如連桿;也可以是由若干零件聯接構成的組合體。
構件依其在機構中的功能分為機架、主動件、聯運件和從動件。機架是機構中相對靜止,支承各運動構件運動的構件;主動件又稱為原動件或輸入件,是輸入運動和動力的構件;從動件又稱為被動件或輸出件,是直接完成機構運動要求,跟隨主動件運動的構件;聯運件是聯接主、從動件的中介構件。
運動副
機構中各個構件之間必須有確定的相對運動,因此,構件的連線既要使兩個構件直接接觸,又能產生一定的相對運動,這種直接接觸的活動連線稱為運動副。軸承中的滾動體與內外圈的滾道,嚙合中的一對齒廓、滑塊與導軌,均保持直接接觸,並能產生一定的相對運動,因而都構成了運動副。兩構件上直接參與接觸而構成運動副的點、線或面稱為運動副元素。
運動鏈和機構
兩個以上的構件通過運動副聯接而成的系統稱為運動鏈。運動鏈分為閉式運動鏈和開式運動鏈兩種。所謂閉式運動鏈是指組成運動鏈的每個構件至少包含兩個運動副,組成一個首末封閉的系統,開式運動鏈的構件中有的構件只包含一個運動副,它們不能組成一個封閉的系統。
自由度和運動副約束
任何一個構件在空間自由運動時皆有六個自由度。它可表示為在直角坐標系內沿著三個坐標軸的移動和繞三個坐標軸的轉動。而對於一個作平面運動的構件,則只有三個自由度。即沿x軸和y軸移動,以及在xOy平面內的轉動。我們把構件相對於參考系具有的獨立運動參數的數目稱為自由度。
兩個及兩個以上的構件通過運動副聯接以後,相對運動受到限制。運動副對成副的兩個構件間的相對運動所加的限制稱為約束。引入一個約束條件將減少一個自由度,而約束的多少及約束的特點取決於運動副的形式。
(1) 轉動副的運動副限制了軸頸2沿x軸和y軸的移動,只允許軸頸繞軸承相對轉動,這種運動副稱為轉動副。轉動副引入了2個約束,保留了1個自由度。
(2) 移動副的運動副,構件這間只能沿x軸作相對移動,這種沿一個方向相對移動的運動副稱為移動副。移動副也具有2個約束,保留了1個自由度。
轉動副和移動副都是面接觸,統稱為低副。
 平面運動結構
平面運動結構(3) 平面高副,在曲線構成的運動副中構件2相對於構件1既可沿接觸點處切線方向移動,又可繞接觸點A轉動,運動副保留了2個自由度,帶進了一個約束。這種點接觸或線接觸的運動副稱為高副。
自由度及計算
機構具有確定運動的條件
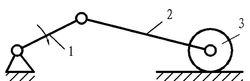
運動鏈和機構都是由機件和運動副組成的系統,機構要實現預期的運動傳遞和變換,必須使其運動具有可能性和確定性。由3個構件通過3 個轉動副聯接而成的系統就沒有運動的可能性。五桿系統,若取構件作為主動件,當給定角度時,構件既可以處在實線位置,也可以處在虛線或其他位置,因此,其從動件的位置是不確定的。但如果給定構件的位置參數,則其餘構件的位置就都被確定下來。四桿機構,當給定構件1的位置時,其他構件的位置也被相應確定。
由此可見,無相對運動的構件組合或無規則亂動的運動鏈都不能實現預期的運動變換。將運動鏈的一個構件固定為機架,當運動鏈中一個或幾個主動件位置確定時,其餘從動件的位置也隨之確定,則稱機構具有確定的相對運動。那么究竟取一個還是幾個構件作主動件,這取決於機構的自由度。機構的自由度就是機構具有的獨立運動的數目,因此,當機構的主動件等於自由度數時,機構就具有確定的相對運動。
平面運動結構的自由度計算
在平面運動鏈中,各構件相對於某一構件所需獨立運動的參變數數目,稱為運動鏈的自由度。它取決於運動鏈中活動構件的數目以及連線各構件的運動副類型和數目。
平面運動鏈自由度計算公式:
F=3n-2L-H
式中:
F --- 運動鏈的自由度
n --- 活動構件的數目
L --- 低副的數目
H --- 高副的數目
設一個平面運動鏈中除去機架時,其餘活動構件的數目為n個。而一個不受任何約束的構件在平面中有三個自由度,故一個運動鏈中活動構件在平面共具有3n個自由度。當兩構件連線成運動副後,其運動受到約束,自由度將減少。自由度減少的數目,應等於運動副引入的約束數目。由於平面運動鏈中的運動副只可能是高副或低副,其中每個低副引入的約束數為2,每個高副引入的約束數為1。因此,對於平面運動鏈,若各構件之間共構成了L個低副和H個高副,則它們共引入(2PL+PH)個約束。運動鏈的自由度F應為:F = 3n-2L-H。此式即為平面運動鏈自由度的計算公式,也稱為平面運動結構結構公式。
由公式可知,機構自由度F取決於活動構件的數目以及運動副的性質和數目。
機構具有確定運動的條件是:機構自由度必須大於零、且原動件數與其自由度必須相等 。
注意事項
計算機構的自由度時,必須注意以下問題。
1、複合鉸鏈
由兩個以上構件組成兩個或更多個共軸線的轉動副,即為複合鉸鏈,為三個構件在A處構成複合鉸鏈。三構件共組成兩個共軸線轉動副。當由m個構件組成複合鉸鏈時,則應當組成(m —1)個共軸線轉動副。
2、虛約束
在運動副引入的約束中,有些約束對機構自由度的影響是重複的。這些對機構運動不起限制作用的重複約束,稱為消極約束或虛約束,在計算機構自由度時,應當除去不計。
平面運動結構的虛約束常出現於下列情況:
(1)兩個構件之間組成多個導路平行的移動副時,只有一個移動副起作用,其餘都是虛約束。
(2)兩個構件之間組成多個軸線重合的迴轉副時,只有一個迴轉副起作用,其餘都是虛約束。如圖2-20所示,兩個軸承支撐一根軸,只能看作一個迴轉副。
(3)機構中對傳遞運動不起獨立作用的對稱部分,也為虛約束。如輪系中,中心輪經過兩個對稱布置的小齒輪和驅動內齒輪,其中有一個小齒輪對傳遞運動不起獨立作用。但由於第二個小齒輪的加入,使機構增加了一個虛約束。
3、局部自由度
機構中常出現一種與輸出構件運動無關的自由度,稱為局部自由度或多餘自由度。在計算機構自由度時,可預先排除。平面凸輪機構中,為了減少高副接觸處的磨損,在從動件上安裝一個滾子,使其與凸輪輪廓線滾動接觸。顯然,滾子繞其自身軸線轉動與否並不影響凸輪與從動件間的相對運動,因此,滾子繞其自身軸線的轉動為機構的局部自由度,在計算機構的自由度時,應預先將轉動副除去不計。
應當注意,對於虛約束,從機構的運動觀點來看是多餘的,但能增加機構的剛性,改善其受力狀況,因而被廣泛採用。但是虛約束對機構的幾何條件要求較高,因此對機構的加工和裝配提出了較高的要求 。
平面運動結構的平衡
 平面運動結構
平面運動結構繞定軸轉動的構件,在運動中所產生的慣性力和慣性力矩可以在構件本身加以平衡。 而對機構中作往復運動和平面複合運動的構件,在運動中產生的慣性力和慣性力矩則不能在構件本身加以平衡,必須對整個機構設法平衡。當機構運動時,各運動構件所產生的慣 性力可以合成為一個通過質心的總慣性力和總慣性力矩,這個總慣性力和總慣性力矩全部 由機座承受。為了消除機構在機座上的動壓力,就必須設法平衡這個總慣性力和總慣性力矩。在實際平衡計算中,總慣性力矩對機座的影回響當與外加的驅動力矩和阻抗力矩一起研究。
優缺點
優點:
1、運動副形狀簡單,易製造;
2、面接觸,承載能力大,可承受衝擊力,套用實例:沖床;
3、實現遠距離傳動或操縱,套用實例:腳踏車手閘;
4、實現多樣的運動軌跡連桿上不同點的軌跡;
5、構件運動形式多樣性連桿構件可以實現往復擺動、連續轉動與往復移動之間的相互轉換,構件具有多種運動形式;
6、改變構件相對長度,可實現不同的運動規律和運動要求。
缺點:
1、連桿機構不適於高速場合;
2、連桿機構中運動的傳遞要經過中間構件,運動傳遞的積累誤差較大 。
