
組合機構
正文
將幾個基本機構聯接起來,以實現單個機構難以實現的複雜運動規律、運動軌跡和特殊運動的不可拆機構。基本機構主要包括連桿機構、齒輪機構和凸輪機構等。組合機構一般不是將幾個基本機構簡單的串聯起來,而是一種較複雜的組合,可以是用不同類型的基本機構組成的齒輪-連桿機構、凸輪-連桿機構和齒輪-凸輪機構,也可以是用同類型的基本機構組成的聯動凸輪機構等。組合機構的運動是通過分析各個基本機構的運動關係,然後根據不同的組合形式聯繫起來獲得一個新的運動關係。齒輪-連桿機構 由1個曲柄搖桿機構(見平面連桿機構)和3個齒輪組成(圖1)。輪Ⅰ與曲柄固接,以角速度ω 1作等速轉動,從動輪 5為輸出件,其角速度ω 5隨機構的不同位置而改變,是曲柄轉角
 1的函式。當曲柄AB等速連續轉動時,從動輪 5能實現多種規律的迴轉運動。求任一給定1角時輪 5的角速度ω 5的方法可分兩步進行:首先,桿1、2、4、6 組成一個鉸鏈四桿機構,由ω 1求出ω 2和ω 4;然後,把輪1、輪3和桿2組成一差動輪系,把輪3、輪5和桿4組成另一差動輪系,從而求出ω 5與ω 2、ω 4 的關係式。由於桿1與輪1同速,桿2和桿4同時為輪系和四桿機構中的構件,可將四桿機構中求得的 ω 2和ω 4代入關係式得ω 5。這樣就可畫出ω 5-1線圖。曲線1、2、3是通過改變l1/r1或l6得到的逆轉、瞬時停歇和非勻速轉動 3種不同特性。曲線1所對應的角稱為逆轉角。曲線2的=0,理論上是瞬時停歇,但由於運動副中的間隙和構件彈性的影響,實際上仍有相當於曲柄轉45°上下的片刻停歇時間。當逆轉角較小時,曲線反映不出逆轉運動,實際上就有更長的停歇時間。齒輪-連桿機構也能實現某些複雜的運動軌跡。
1的函式。當曲柄AB等速連續轉動時,從動輪 5能實現多種規律的迴轉運動。求任一給定1角時輪 5的角速度ω 5的方法可分兩步進行:首先,桿1、2、4、6 組成一個鉸鏈四桿機構,由ω 1求出ω 2和ω 4;然後,把輪1、輪3和桿2組成一差動輪系,把輪3、輪5和桿4組成另一差動輪系,從而求出ω 5與ω 2、ω 4 的關係式。由於桿1與輪1同速,桿2和桿4同時為輪系和四桿機構中的構件,可將四桿機構中求得的 ω 2和ω 4代入關係式得ω 5。這樣就可畫出ω 5-1線圖。曲線1、2、3是通過改變l1/r1或l6得到的逆轉、瞬時停歇和非勻速轉動 3種不同特性。曲線1所對應的角稱為逆轉角。曲線2的=0,理論上是瞬時停歇,但由於運動副中的間隙和構件彈性的影響,實際上仍有相當於曲柄轉45°上下的片刻停歇時間。當逆轉角較小時,曲線反映不出逆轉運動,實際上就有更長的停歇時間。齒輪-連桿機構也能實現某些複雜的運動軌跡。 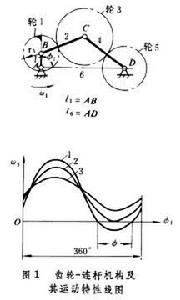 組合機構
組合機構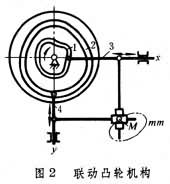 組合機構的關係x=x()和y=y()。由於兩個凸輪的轉角相同,消去式中的就可得到表達Μ點軌跡的y=y(x)關係。反之,如果繪出軌跡mm或方程y=y(x),也可分解成x和y方向兩部分運動,從而設計出凸輪廓線。
組合機構的關係x=x()和y=y()。由於兩個凸輪的轉角相同,消去式中的就可得到表達Μ點軌跡的y=y(x)關係。反之,如果繪出軌跡mm或方程y=y(x),也可分解成x和y方向兩部分運動,從而設計出凸輪廓線。 組合機構的種類繁多,套用也日趨廣泛。對於組合機構的綜合,多半尚停留在具體機構的具體分析階段,有待進一步研究。
