
基本命名
這種濾波方法以它的發明者魯道夫.E.卡爾曼(Rudolph E. Kalman)命名,但是根據文獻可知實際上Peter Swerling在更早之前就提出了一種類似的算法。
斯坦利.施密特(Stanley Schmidt)首次實現了卡爾曼濾波器。卡爾曼在NASA埃姆斯研究中心訪問時,發現他的方法對於解決阿波羅計畫的軌道預測很有用,後來阿波羅飛船的導航電腦便使用了這種濾波器。 關於這種濾波器的論文由Swerling (1958)、Kalman (1960)與 Kalman and Bucy (1961)發表。
 卡爾曼濾波器
卡爾曼濾波器目前,卡爾曼濾波已經有很多不同的實現.卡爾曼最初提出的形式現在一般稱為簡單卡爾曼濾波器。除此以外,還有施密特擴展濾波器、信息濾波器以及很多Bierman, Thornton 開發的平方根濾波器的變種。也許最常見的卡爾曼濾波器是鎖相環,它在收音機、計算機和幾乎任何視頻或通訊設備中廣泛存在。
套用實例
卡爾曼濾波的一個典型實例是從一組有限的,包含噪聲的,對物體位置的觀察序列(可能有偏差)預測出物體的位置的坐標及速度。在很多工程套用(如雷達、計算機視覺)中都可以找到它的身影。同時,卡爾曼濾波也是控制理論以及控制系統工程中的一個重要課題。
例如,對於雷達來說,人們感興趣的是其能夠跟蹤目標。但目標的位置、速度、加速度的測量值往往在任何時候都有噪聲。卡爾曼濾波利用目標的動態信息,設法去掉噪聲的影響,得到一個關於目標位置的好的估計。這個估計可以是對當前目標位置的估計(濾波),也可以是對於將來位置的估計(預測),也可以是對過去位置的估計(插值或平滑)。
介紹
為了可以更加容易的理解卡爾曼濾波器,這裡會套用形象的描述方法來講解,而不是像大多數參考書那樣羅列一大堆的數學公式和數學符號。但是,他的5條公式是其核心內容。結合現代的計算機,其實卡爾曼的程式相當的簡單,只要你理解了他的那5條公式。
在介紹他的5條公式之前,先讓我們來根據下面的例子一步一步的探索。
假設我們要研究的對象是一個房間的溫度。根據你的經驗判斷,這個房間的溫度是恆定的,也就是下一分鐘的溫度等於現在這一分鐘的溫度(假設我們用一分鐘來做時間單位)。假設你對你的經驗不是100%的相信,可能會有上下偏差幾度。我們把這些偏差看成是高斯白噪聲(White Gaussian Noise),也就是這些偏差跟前後時間是沒有關係的而且符合高斯分配(Gaussian Distribution)。另外,我們在房間裡放一個溫度計,但是這個溫度計也不準確的,測量值會比實際值偏差。我們也把這些偏差看成是高斯白噪聲。
好了,現在對於某一分鐘我們有兩個有關於該房間的溫度值:你根據經驗的預測值(系統的預測值)和溫度計的值(測量值)。下面我們要用這兩個值結合他們各自的噪聲來估算出房間的實際溫度值。
假如我們要估算k時刻的是實際溫度值。首先你要根據k-1時刻的溫度值,來預測k時刻的溫度。因為你相信溫度是恆定的,所以你會得到k時刻的溫度預測值是跟k-1時刻一樣的,假設是23度,同時該值的高斯噪聲的偏差是5度(5是這樣得到的:如果k-1時刻估算出的最優溫度值的偏差是3,你對自己預測的不確定度是4度,他們平方相加再開方,就是5)。然後,你從溫度計那裡得到了k時刻的溫度值,假設是25度,同時該值的偏差是4度。
由於我們用於估算k時刻的實際溫度有兩個溫度值,分別是23度和25度。究竟實際溫度是多少呢?相信自己還是相信溫度計呢?究竟相信誰多一點,我們可以用他們的covariance來判斷。因為Kg^2=5^2/(5^2+4^2),所以Kg=0.78,我們可以估算出k時刻的實際溫度值是:23+0.78*(25-23)=24.56度。可以看出,因為溫度計的covariance比較小(比較相信溫度計),所以估算出的最優溫度值偏向溫度計的值。
現在我們已經得到k時刻的最優溫度值了,下一步就是要進入k+1時刻,進行新的最優估算。到現在為止,好像還沒看到什麼自回歸的東西出現。對了,在進入k+1時刻之前,我們還要算出k時刻那個最優值(24.56度)的偏差。算法如下:((1-Kg)*5^2)^0.5=2.35。這裡的5就是上面的k時刻你預測的那個23度溫度值的偏差,得出的2.35就是進入k+1時刻以後k時刻估算出的最優溫度值的偏差(對應於上面的3)。
就是這樣,卡爾曼濾波器就不斷的把covariance遞歸,從而估算出最優的溫度值。他運行的很快,而且它只保留了上一時刻的covariance。上面的Kg,就是卡爾曼增益(Kalman Gain)。他可以隨不同的時刻而改變他自己的值,是不是很神奇!
下面就要言歸正傳,討論真正工程系統上的卡爾曼。
算法
在這一部分,我們就來描述源於Dr Kalman 的卡爾曼濾波器。下面的描述,會涉及一些基本的概念知識,包括機率(Probability),隨機變數(Random Variable),高斯或正態分配(Gaussian Distribution)還有State-space Model等等。但對於卡爾曼濾波器的詳細證明,這裡不能一一描述。
首先,我們先要引入一個離散控制過程的系統。該系統可用一個線性隨機微分方程(Linear Stochastic Difference equation)來描述:
X(k)=A X(k-1)+B U(k)+W(k)
再加上系統的測量值:
Z(k)=H X(k)+V(k)
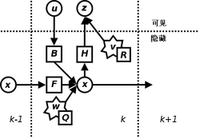
上兩式子中,X(k)是k時刻的系統狀態,U(k)是k時刻對系統的控制量。A和B是系統參數,對於多模型系統,他們為矩陣。Z(k)是k時刻的測量值,H是測量系統的參數,對於多測量系統,H為矩陣。W(k)和V(k)分別表示過程和測量的噪聲。他們被假設成高斯白噪聲(White Gaussian Noise),他們的covariance 分別是Q,R(這裡我們假設他們不隨系統狀態變化而變化)。
對於滿足上面的條件(線性隨機微分系統,過程和測量都是高斯白噪聲),卡爾曼濾波器是最優的信息處理器。下面我們來用他們結合他們的covariances 來估算系統的最最佳化輸出(類似上一節那個溫度的例子)。
首先我們要利用系統的過程模型,來預測下一狀態的系統。假設現在的系統狀態是k,根據系統的模型,可以基於系統的上一狀態而預測出現在狀態:
X(k|k-1)=A X(k-1|k-1)+B U(k) ……….. (1)
式(1)中,X(k|k-1)是利用上一狀態預測的結果,X(k-1|k-1)是上一狀態最優的結果,U(k)為現在狀態的控制量,如果沒有控制量,它可以為0。
到現在為止,我們的系統結果已經更新了,可是,對應於X(k|k-1)的covariance還沒更新。我們用P表示covariance:
P(k|k-1)=A P(k-1|k-1) A’+Q ……… (2)
式(2)中,P(k|k-1)是X(k|k-1)對應的covariance,P(k-1|k-1)是X(k-1|k-1)對應的covariance,A’表示A的轉置矩陣,Q是系統過程的covariance。式子1,2就是卡爾曼濾波器5個公式當中的前兩個,也就是對系統的預測。
現在我們有了現在狀態的預測結果,然後我們再收集現在狀態的測量值。結合預測值和測量值,我們可以得到現在狀態(k)的最最佳化估算值X(k|k):
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1)) ……… (3)
其中Kg為卡爾曼增益(Kalman Gain):
Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R) ……… (4)
到現在為止,我們已經得到了k狀態下最優的估算值X(k|k)。但是為了要令卡爾曼濾波器不斷的運行下去直到系統過程結束,我們還要更新k狀態下X(k|k)的covariance:
P(k|k)=(I-Kg(k) H)P(k|k-1) ……… (5)
其中I 為1的矩陣,對於單模型單測量,I=1。當系統進入k+1狀態時,P(k|k)就是式子(2)的P(k-1|k-1)。這樣,算法就可以自回歸的運算下去。
卡爾曼濾波器的原理基本描述了,式子1,2,3,4和5就是他的5 個基本公式。根據這5個公式,可以很容易的實現計算機的程式。
套用實例
卡爾曼濾波的一個典型實例是從一組有限的,包含噪聲的,對物體位置的觀察序列(可能有偏差)預測出物體的位置的坐標及速度。在很多工程套用(如雷達、計算機視覺)中都可以找到它的身影。同時,卡爾曼濾波也是控制理論以及控制系統工程中的一個重要課題。
例如,對於雷達來說,人們感興趣的是其能夠跟蹤目標。但目標的位置、速度、加速度的測量值往往在任何時候都有噪聲。卡爾曼濾波利用目標的動態信息,設法去掉噪聲的影響,得到一個關於目標位置的好的估計。這個估計可以是對當前目標位置的估計(濾波),也可以是對於將來位置的估計(預測),也可以是對過去位置的估計(插值或平滑)。
目標跟蹤示例代碼:(具體解釋請見參考資料)
Z=(1:100); %觀測值
noise=randn(1,100); %方差為1的高斯噪聲
Z=Z+noise;
X=[0;0]; %狀態
P=[10;01]; %狀態協方差矩陣
F=[11;01]; %狀態轉移矩陣
Q=[0.0001,0;00.0001]; %狀態轉移協方差矩陣
H=; %觀測矩陣
R=1; %觀測噪聲方差
figure;
hold on;
fori=1:100
X_ = F*X;
P_ = F*P*F'+Q;
K = P_*H'/(H*P_*H'+R);
X = X_+K*(Z(i)-H*X_);
P = (eye(2)-K*H)*P_;
plot(X(1), X(2)); %畫點,橫軸表示位置,縱軸表示速度
end
