
零力矩點的定義
零力矩點(ZMP,Zero Moment Point)
零力矩點,1968年南斯拉夫學者M.Vukobratovic在其步行機器人動態平衡理論中定義了這一概念,到了80年代早稻田的加藤一郎實驗室(Ichiro Kato's laboratory at Waseda University)製作了一系列的WL機器人,這些雙足機器人是最早將此概念實際套用到動態平衡的雙足步行機器人。
作用
那ZMP有什麼用呢?
 零力矩點
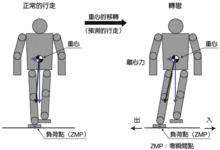
零力矩點如果ZMP落在腳掌的範圍裡面,則機器人可以穩定的行走。
圖示
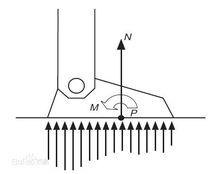
地面反作用力對人腳部的影響是複雜的,但是,總可以簡化成有任意一點P,而地面的反作用力對人腳部的貢獻可以等價為一個力N與力矩M,如右圖所示。而零力矩點(ZMP, Zero Moment Point)的定義就是在地面上存在一點P,使得與地面平行軸方向的,由慣性力(F=ma)與重力(G=mg)所產生的淨力矩為零的點。
右圖給出了機器人足底所受作用力分布的例子。沿足底分布的負載具有相同的方向,他們等效於一個合力N,合力N所通過的在足底上的這個作用點被稱為零力矩點,簡稱ZMP。
 零力矩點
零力矩點零力矩點在仿人機器人領域的套用
套用
 Honda的Asimo
Honda的Asimo有名的例子,像是Honda的Asimo就是利用ZMP的相關理論來達到雙足機器人的步行和平衡。
對比
很多的雙足機器人研究都是基於ZMP的方法。但是利用的方式各有巧妙不同。
傳統的機械領域,都是去建立雙足機器人的數學模型,並根據ZMP必須落在穩定區域(腳掌範圍)去推導控制法則。建立雙足機器人的數學模型,本身就是一件很複雜的事。即便是可以建立出符合真實機器人的數學模型,但進一步去求解控制法則,所需要的數學運算更是一件困難的工作。早期的研究光是能正確地推導及求解雙足機器人的數學模型就足夠上一流的期刊。雖然不是一件簡單的工作,但是如果能正確地推導出數學模型,便可以利用這些數學模型去寫程式,用電腦來作模擬。
