
內容
責任動力學的兩種力量:約束力和驅動力
責任靜力系統:約束力
1.責任靜力系統:約束力
我們把社會靜態力量系統稱為約束力量。這種靜態力量存在形態為特定階段的普世、公認和認可的規則,它是用來制約與指導人們在社會行動的準則。
約束力量根據其特徵形式,可以分為顯性約束力和隱性約束力兩種。
顯性約束力。顯性約束力是社會組織制度法規正式的、帶有限定角色性、特定強制性和契約性規則。通常表現為法律、法規、制度規範等形態。
隱性約束力。隱性約束力是社會組織非正式的、一般非角色限定性、非強制性和無固定契約性規則。通常表現為道德、文化、口頭規則等形態。
2 行為動力系統:驅動力
把社會動態力量系統稱為驅動力量。這種動態力量源於人類的社會、組織、團體和個體追求秩序、安全、社會(組織)情感關係、權利、利益、榮譽和地位等的需求,它是構成人類在社會(組織)中行動、行為和活動的基本力量。
驅動力量根據其特徵形式,可分為外驅動力和內驅動力兩種。
外驅動力。外驅動力是為了滿足社會組織共性規則需求的共性力量,強調整體一致性表現,維繫社會組織的穩定性期望。
內驅動力。內驅動力是為了滿足社會組織共性規則以外的需要突破,允許個體差異性力量表現。創造社會組織的動態發展期望。
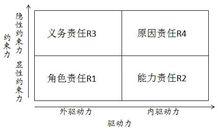
3.責任原理建模:四種基本的責任屬性
責任根據這兩個基本的力量的兩兩相交關係,形成了四個象限。
角色責任(顯性約束力,外驅動力)
能力責任(顯性約束力,內驅動力)
義務責任(隱性約束力,外驅動力)
原因責任(隱性約束力,內驅動力)
4.四種責任動力系統比喻:
角色責任,剎車動力系統;
能力責任,加速動力系統;
義務責任,輔助動力系統;
原因責任,導航動力系統。
依據
馬克思認為人的本質是一切社會關係的總和。而責任是對人的行動在社會關係中的評價。因此將責任定義為: 責任本質上是人的一切行動在一切社會關係中的評價總和。
 責任動力學
責任動力學我們提出責任構成的兩個基本要素和先決條件:
一.人的本質是一切社會關係的總和,人具有社會性,並且受社會各種關係的約束,而這種社會關係是以一張靜態的力量存在於社會中。在本書中將這種靜態力量統稱為 約束力。比如,我們的法律法規、制度流程、文化習俗都是約束力量。
約束力包括企業正式的、法定的、具有強制懲罰性的規章制度和具有道德輿論性的、不具有法定強制懲罰性的社會和企業文化。前者統稱為顯性約束力、或稱為強制約束力,後者稱為隱性約束力或非強制約束力。
二.人的社會行動是源自各種力量驅動的,這種驅動力量是實在的與動態的,我們在本書中將這種動態力量統稱為 驅動力。比如,我們追求的權利、利益、安全、社會地位都是這種驅動力量。
驅動力包括外部驅動力和內部驅動力,外驅動力是行為人的行動的維繫力,符合社會、組織的共性利益;內驅動力是行為人的行動的突破力,存在個體差異性。
理性責任矩陣建模與管理運用簡介
基於責任概念和構建的兩要素分析,我們通過對約束力、驅動力進行屬性再分析,構建成責任(約束-驅動)矩陣,建立了責任數學分析模型與原理。
責任矩陣認為責任是人類社會發展的天然理性力量,說它是理性的力量是因為它包含了兩種力量:一種是約束力,另一種是驅動力。
 責任動力學
責任動力學責任公式和圖式數學建模:
責任R=社會(組織)關係(Y軸)*社會(組織)行為(X軸)
X為責任動力系統,即社會(組織)所期待的社會(組織)行動或行動模式;
Y為責任靜力系統,即社會(組織)行為指導、評價、判斷、處置的規則系統。
(理性責任4R矩陣)
因此根據責任兩個維度,我們構建了責任(4R)矩陣,並提出四個責任單位:角色責任R1、能力責任R2、義務責任R3、原因責任R4概念。
角色責任R1(外驅動力,顯性約束力)
角色責任R1由外驅動力導向和顯性約束力構成,表示的是當個體行為滿足社會(組織)期望,結果具有共性和一致性,對類似這種行為評價的總和,即為角色責任R1,其典型特徵是不違反社會(組織)規則為原則、行為與結果之間共性和一致性、易評價和監管。
通俗理解為:角色在規則下必須做的事。因具有明顯的約束和外部監管條件,其數學表達式為(-1,0),按照規則做,正常狀態為(0),違反規則的狀態為(-1)。通常為遵守公司的各項規則制度的責任行為方面。這種極性為約束性原則,要么符合規則,要么就是違反。
管理模式為:制度類行為結果。
角色責任將為責任管理提供以下管理內容:責任邊界問題即分工與崗位職責的區分,公司規則系統,即制度、流程、標準與規範建設問題。
數學表達式:R1=(-1,0)
能力責任R2(內驅動力,顯性約束力)
能力責任R2由內驅動力導向和顯性約束力構成,表示的是對個體超出組織期望的部分進行變動評價,其典型特徵就是結果的差異性。
通俗理解為:努力做事情的差異性結果。數學表達式為(0~N),表示責任會因人而異,產生不同的結果差異,這種差異為程度性的,不存在正負極性。
管理模式為:目標激勵類行為結果
能力責任將為責任管理提供以下管理內容:責任評價問題即競爭、目標激勵機制建設,包括崗位目標體系、薪酬結構、績效管理、勝任力模型等問題。
數學表達式:R2=(0~N)
義務責任R3(外驅動力,隱性約束力)
義務責任R3由外驅動力導向和隱性約束力構成,表示的是對個體選擇社會(組織)鼓勵、倡導但又是制度規則無法強制性要求的行為進行評價,其典型特徵是無強制的責任契約關係。
通俗理解為:可做、可不做的事情。因非角色特定責任或無法強制和難以監督的原因,就無法對結果進行正式約束。其數學表達式為(0,1),表示行為人可以做(1),也可以不做(0),不存在處罰,但組織內部鼓勵行為人行動有為。
管理模式為:企業文化或軟性號召(精神鼓勵)管理
義務責任將為責任管理提供以下管理內容:責任互動問題即合作,企業內部協同系統,企業文化、企業精神等問題。
數學表達式:R=R(0,+1)
原因責任R4 (內驅動力,隱性約束力)
原因責任R4由內驅動力導向和隱性約束力構成,表示的是對個體在外界沒有強制約束力條件下由個體思想、觀念、理念以及信仰因素作為內驅動力主導下進行行為選擇的評價。數學表達式為(C,c),表示行為人可以做利他性(通常為利於組織方面)(C)選擇,也可以做利我性(站在自己的立場)(c)選擇,其典型特徵是無強制性地決策過程。
通俗理解為:因不同原因選擇下做的事情。依靠行為人的內驅動並且無顯性約束條件下的責任,這種責任停留在行為者的思想理念層。
原因責任將為責任管理提供以下管理內容:責任理念問題即選擇系統,包括企業發展理念、價值觀、願景、使命、企業戰略等問題。
數學表達式:R=R(C,c)/(0,~N)
理性責任4R圖式:
R =R+R+RR
這個責任圖式包括了我們人類的所有責任範疇,同時,這四種責任分別破譯了人與制度規則的關係、人與目標激勵的關係、人與文化協作的關係、人與思想理念的關係。同時,解決社會組織進化的規則,即分工、競爭、合作、選擇。
理性責任(4R)矩陣實際上是解決了人類個體行為與社會(組織)行為選擇模式。一般行為選擇動力結果取決於動力的方向與大小。這個行為選擇動力取決於社會(組織)關係,在社會(組織)關係中既存在一般約束力和一般驅動力,一般約束力包括社會(組織)層面的也包括個體自身層面約束因素,根據一般約束力的表現規律可分為顯性與隱性之分;一般驅動力也包括社會(組織)層面和個體自身層面驅動因素。
