
研發背景
谷歌無人駕駛汽車項目是這位43歲的史丹福大學人工智慧實驗室的主任、谷歌工程師和谷歌街景地圖服務的創造者之一塞巴斯蒂安-特龍(Sebastian Thrun )領導的一個谷歌團隊所研發的。
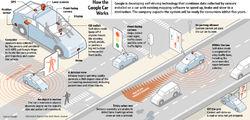
由於城市道路的各種目標比較繁雜,因此對於自動駕駛汽車而言,城市道路的駕駛,要比高速公路複雜。谷歌無人駕駛汽車經過升級的最新軟體系統,可以同時對“數百個目標”保持監測,其中包括行人、公共汽車,一個作出左轉手勢的腳踏車騎行者,以及一個保護學生過馬路的人舉起的停車指示牌。據稱,谷歌無人駕駛汽車一共記錄的里程數據已經達到了70萬英里。
其後,這一支由15位工程師組成的團隊繼續投身於此項目。並且另外聘請了至少12人,這些人均沒有不良駕駛記錄,由他們坐在主駕座上以觀察汽車行駛狀況,提供自動駕駛感受和改進建議。谷歌在此項目中使用了六輛普銳斯和一輛奧迪TT。
管理團隊
 谷歌無人駕駛汽車
谷歌無人駕駛汽車2015年9月14日谷歌周日晚間公布:已經聘請了汽車行業資深人士約翰·克拉夫西克(John Krafcik)掌管其自動駕駛汽車項目。多年來負責該項目試驗的工程師克里斯·烏爾姆森(Chris Urmson)將繼續擔任技術主管。
歷史沿革
1912年:凱迪拉克的自動啟動系統意味著駕駛人不再用手動曲柄啟動汽車。
1939年:奧茲莫比爾公司推出了第一個自動變速系統。
1951年:克萊斯勒推出第一款油壓轉向系統
1958年:克萊斯勒的巡航控制系統使得駕駛人不用再時時注意行駛速度。
1970年:克萊斯勒Imperial首先配備防抱死剎車系統。
1997年:部分豐田車配備基於雷達的自適應巡航控制,可與前車自動保持安全駕駛距離。
2002年:豐田推出NightView(夜視),一款車內監視器,可顯示前方道路的近紅外圖像,凸顯障礙。
2003年:梅賽德斯推出Pre-Safe系統,採用感應器預測迫在眉睫的撞擊,採取各種防範措施。
2004年:英菲尼迪(日本豪華車品牌)推出第一款“離開車道”警示系統,在車駛離車道時提醒駕駛人。
2005年:沃爾沃推出第一款盲點警報系統,當有車進入駕駛人盲點時就會發出警報。
2006年:雷克薩斯(豐田旗下高檔品牌)推出相機-聲納輔助的平行泊車系統。
2007年:卡內基梅隆大學的Tartan車隊贏得美國國防部的自動汽車比賽大獎。
2008年:梅賽德斯引進AttentionAssit,在駕駛人顯露疲勞徵兆時發出警告。
2009年:沃爾沃推出行人監測系統。
2010年:奧迪無人駕駛自動汽車TTS行駛12.42公里,抵達落基山派克峰頂。
2010年:7輛車組成的Google無人駕駛汽車車隊開始在加州道路上試行。
2010年:梅賽德斯F800Style概念車展示賽車助手,一款低速適應巡航控制系統。
2011年:中國國防科技大學創造的一輛無人駕駛汽車行駛177英里,從長沙開至武漢。
2012年:通用汽車公司的阿蘭·陶伯估計,這一年自動駕駛系統將成為汽車標準配置。
技術原理
車頂上的掃描器發射64束雷射射線,然後雷射碰到車輛周圍的物體,又反射回來,這樣就計算出了物體的距離。另一套在底部的系統測量出車輛在三個方向上的加速度、角速度等數據,然後再結合GPS數據計算出車輛的位置,所有這些數據與車載攝像機捕獲的圖像一起輸入計算機,軟體以極高的速度處理這些數據。這樣,系統就可以非常迅速的作出判斷。
 谷歌無人駕駛汽車
谷歌無人駕駛汽車產品特點
目前谷歌無人駕駛汽車 已經行駛超過30萬英里。技術人員表示:谷歌無人駕駛汽車通過攝像機、雷達感測器和雷射測距儀來“看到”其他車輛,並使用詳細的地圖(我們通過手動駕駛車輛收集而來)來進行導航。我們的手動駕駛車輛收集來的信息是如此巨大,我們必須將這些信息進行處理轉換,谷歌數據中心將這一切變成了可能,它的數據處理能力是如此強大。截止到2012年底,所面臨的難題主要是自動駕駛汽車和人駕駛的汽車如何共處而不引起交通事故的問題。
車載設備
 谷歌無人駕駛汽車
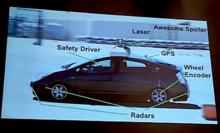
谷歌無人駕駛汽車1 雷達 Radar
高端汽車已經裝載了雷達,它可以用來跟蹤附近的物體。例如,梅賽德斯的自動巡航控制系統便是一種事故預防系統,它的後保險槓上有一個裝置,當它在汽車的盲點內檢測到物體時便會發出警報。
2 車道保持系統 Lane-keeping
在擋風玻璃上裝載的攝像頭可以通過分析路面和邊界線的差別來識別車道標記。如果汽車不小心離開了車道,方向盤會輕微震動來提醒駕駛者。
3 雷射測距系統 LIDAR
谷歌採用了Velodyne公司的車頂雷射測距系統。
 谷歌無人駕駛汽車
谷歌無人駕駛汽車4 紅外攝像頭 Infrared Camera
梅賽德斯的夜視輔助功能使用了兩個前燈來傳送不可見且不可反射的紅外光線到前方的路面。而擋風玻璃上裝載的攝像頭則用來檢測紅外標記,並且在儀錶盤的顯示器上呈現被照亮的圖像(其中危險因素會被突出)。
5 立體視覺 Stereo Vision
梅賽德斯的原型系統在擋風玻璃上裝載了兩個攝像頭以實時生成前方路面的三維圖像,檢測諸如行人之類的潛在危險,並且預測他們的行動。
 雷達感測器
雷達感測器6 GPS/慣性導航系統
一個自動駕駛員需要知道他正在去哪兒。谷歌使用Applanix公司的定位系統,以及他們自己的製圖和GPS 技術。
7 車輪角度編碼器 Wheel Encoder
輪載感測器可以在谷歌汽車穿梭於車流中時測量它的速度。
研發進展
2005年,塞巴斯蒂安-特龍領導一個由斯坦福學生和教師組成的團隊設計出了斯坦利機器人汽車,該車在由美國國防部高級研究計畫局(DARPA)舉辦的第二屆“挑戰”(Grand Challenge)大賽中奪冠。
2012年4月1日,Google 決定聯合 NASCAR,將自己的無人駕駛汽車跟真正的賽車一起比試比試,證明機器人比人類駕車技術要高。不過在正式加入NASCAR 之前,他們的無人駕駛汽車還需要經過各種檢測才能最終駛向NASCAR 的賽道。
2012年5月8日,美國內華達州機動車輛管理部門(DMV)為谷歌的自動駕駛車頒發了首例駕駛許可證,這意味著谷歌自動駕駛車將很快在內達華州上路。
2014年4月28日,無人駕駛汽車項目的負責人表示,谷歌無人駕駛汽車的軟體系統,可以同時“緊盯”街上的“數百個”目標,包括行人、車輛,做到萬無一失。谷歌無人駕駛汽車曾經在谷歌總部所在的加州山景城長期行駛,已經記錄到了數千英里的數據。
2014年5月28日Code Conference 科技大會上,Google 也拿出了自己的新產品——無人駕駛汽車。和一般的汽車不同,Google 無人駕駛汽車沒有方向盤和剎車。
Google 的無人駕駛汽車還處於原型階段,不過即便如此,它依舊展示出了與眾不同的創新特性。和傳統汽車不同,Google 無人駕駛汽車行駛時不需要人來操控,這意味著方向盤、油門、剎車等傳統汽車必不可少的配件,在 Google 無人駕駛汽車上通通看不到,軟體和感測器取代了它們。
不過 Google 聯合創始人謝爾蓋·布林(Sergey Brin)說,這輛無人駕駛汽車還很初級,Google 希望它可以儘可能地適應不同的使用場景,只要按一下按鈕,就能把用戶送到目的地。
2015年11月底,根據谷歌提交給機動車輛管理局的報告,谷歌的無人駕駛汽車在自動模式下已經完成了130萬多英里。
搶線事件
2015年6月,谷歌一輛無人駕駛汽車的原型車在矽谷差點與競爭對手的無人汽車發生事故。這是首次涉及兩輛無人駕駛車輛的交通事件。
美國德爾福汽車(Delphi Automotive PLC)矽谷實驗室主任,自動駕駛項目全球商業總監約翰·艾布斯米爾(Jpohn Absmeier)透露,公司一輛由奧迪Q5跨界車改裝的自動駕駛原型車在Palo Alto一條道路上變線時,被谷歌一輛雷克薩斯RX400h改裝而來的自動汽車搶線攔住去路,被迫取消變線。
艾布斯米爾稱他作為乘客目睹了事件經過,並稱德爾福的車輛“反應妥善”,沒有發生碰撞事故。
谷歌對此不予置評。
