
結構原理
 蜂鳴器示意圖
蜂鳴器示意圖2.電磁式蜂鳴器電磁式蜂鳴器由振盪器、電磁線圈、磁鐵、振動膜片及外殼等組成。
接通電源後,振盪器產生的音頻信號電流通過電磁線圈,使電磁線圈產生磁場。振動膜片在電磁線圈和磁鐵的相互作用下,周期性地振動發聲。
製作
 蜂鳴器
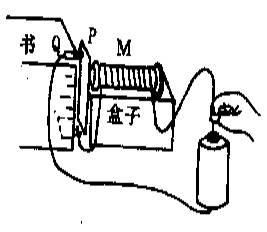
蜂鳴器(2)製備彈片p:從鐵罐頭盒上剪下一條寬約2厘米的長鐵片,彎成直角,把電磁鐵的一條引線接在彈片上,再用膠布把彈片緊貼在木板上。
(3)用曲別針做觸頭q,用書把曲別針墊高,用膠布粘牢,引出一條導線,如圖連線好電路。
(4)調節m與p之間的距離(通過移動盒子),使電磁鐵能吸引彈片,調節觸點與彈片之間的距離,使它們能恰好接觸,通電後就可以聽到蜂鳴聲。
區別
區分有源蜂鳴器和無源蜂鳴器
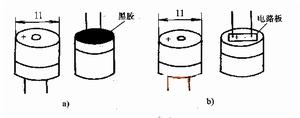
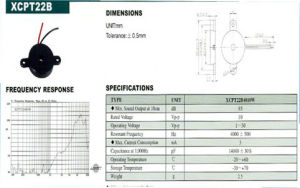
市場上出售的一種小型蜂鳴器因其體積小(直徑只有llmm)、重量輕、價格低、結構牢靠,而廣泛地套用在各種需要發聲的電器設備、電子製作和單片機等電路中。從外觀上看,兩種蜂鳴器好像一樣,但仔細看,兩者的高度略有
 蜂鳴器示意圖
蜂鳴器示意圖迸一步判斷有源蜂鳴器和無源蜂鳴器,還可以用萬用表電阻檔Rxl檔測試:用黑表筆接蜂鳴器""引腳,紅表筆在另一引腳上來回碰觸,如果觸發出咔、咔聲的且電阻只有8Ω(或16Ω)的是無源蜂鳴器;如果能發出持續聲音的,且電阻在幾百歐以上的,是有源蜂鳴器。有源蜂鳴器直接接上額定電源(新的蜂鳴器在標籤上都有註明)就可連續發聲;而無源蜂鳴器則和電磁揚聲器一樣,需要接在音頻輸出電路中才能發聲。
蜂鳴器是一種一體化結構的電子訊響器,廣泛套用於計算機、印表機、複印機、報警器、電子玩具、汽車電子設備、電話機、定時器等電子產品中作發聲器件;蜂鳴器主要分為壓電式蜂鳴器和電磁式蜂鳴器兩種類型。壓電式蜂鳴器主要由多諧振盪器、壓電蜂鳴片、阻抗匹配器及共鳴箱、外殼等組成。多諧振盪器由電晶體或積體電路構成,當接通電源後(1.5~15V直流工作電壓),多諧振盪器起振,輸出1.5~2.5kHZ的音頻信號,阻抗匹配器推動壓電蜂鳴片發聲。
電磁式蜂鳴器由振盪器、電磁線圈、磁鐵、振動膜片及外殼等組成。接通電源後,振盪器產生的音頻信號電流通過電磁線圈,使電磁線圈產生磁場,振動膜片在電磁線圈和磁鐵的相互作用下,周期性地振動發聲。
內部構成
 蜂鳴器型號
蜂鳴器型號2.線軸
3.線圈
4.磁鐵
5.底座
6.引腳
7.外殼
8.鐵芯
9.封膠
10.小鐵片
11.振動膜
12.電路板
驅動原理
蜂鳴器發聲原理是電流通過電磁線圈,使電磁線圈產生磁場來驅動振動膜發聲的,因此需要一定的電流才能驅動它,單片機IO引腳輸出的電流較小,單片機輸出的TTL電平基本上驅動不了蜂鳴器,因此需要增加一個電流放大的電路。S51增強型單片機實驗板通過一個三極體C8550來放大驅動蜂鳴器。蜂鳴器的正極接到VCC(+5V)電源上面,蜂鳴器的負極接到三極體的發射極E,三極體的基級B經過限流電阻R1後由單片機的P3.7引腳控制,當P3.7輸出高電平時,三極體T1截止,沒有電流流過線圈,蜂鳴器不發聲;當P3.7輸出低電平時,三極體導通,這樣蜂鳴器的電流形成迴路,發出聲音。因此,人們可以通過程式控制P3.7腳的電平來使蜂鳴器發出聲音和關閉。程式中改變單片機P3.7引腳輸出波形的頻率,就可以調整控制蜂鳴器音調,產生各種不同音色、音調的聲音。另外,改變P3.7輸出電平的高低電平占空比,則可以控制蜂鳴器的聲音大小,這些都可以通過編程實驗來驗證。
驅動模組
在單片機套用的設計上,很多方案都會用到蜂鳴器,大部分都是使用蜂鳴器來做提示或報警,比如按鍵按下、開始工作、工作結束或是故障等等。這裡對單片機在蜂鳴器驅動上的套用作一下描述。驅動方式
由於自激蜂鳴器是直流電壓驅動的,不需要利用交流信號進行驅動,只需對驅動口輸出驅動電平並通過三極體放大驅動電流就能使蜂鳴器發出聲音,很簡單,這裡就不對自激蜂鳴器進行說明了。這裡只對必須用1/2duty的方波信號進行驅動的他激蜂鳴器進行說明。單片機驅動他激蜂鳴器的方式有兩種:一種是PWM輸出口直接驅動,另一種是利用I/O定時翻轉電平產生驅動波形對蜂鳴器進行驅動。
PWM輸出口直接驅動是利用PWM輸出口本身可以輸出一定的方波來直接驅動蜂鳴器。在單片機的軟體設定中有幾個系統暫存器是用來設定PWM口的輸出的,可以設定占空比、周期等等,通過設定這些暫存器產生符合蜂鳴器要求的頻率的波形之後,只要打開PWM輸出,PWM輸出口就能輸出該頻率的方波,這個時候利用這個波形就可以驅動蜂鳴器了。比如頻率為2000Hz的蜂鳴器的驅動,可以知道周期為500μs,這樣只需要把PWM的周期設定為500μs,占空比電平設定為250μs,就能產生一個頻率為2000Hz的方波,通過這個方波再利用三極體就可以去驅動這個蜂鳴器了。
而利用I/O定時翻轉電平來產生驅動波形的方式會比較麻煩一點,必須利用定時器來做定時,通過定時翻轉電平產生符合蜂鳴器要求的頻率的波形,這個波形就可以用來驅動蜂鳴器了。比如為2500Hz的蜂鳴器的驅動,可以知道周期為400μs,這樣只需要驅動蜂鳴器的I/O口每200μs翻轉一次電平就可以產生一個頻率為2500Hz,占空比為1/2dut的方波,再通過三極體放大就可以驅動這個蜂鳴器了。
驅動電路
 蜂鳴器
蜂鳴器蜂鳴器驅動電路一般都包含以下幾個部分:一個三極體、一個蜂鳴器、一個續流二極體 和一個電源濾波電容。
1.蜂鳴器
發聲元件,在其兩端施加直流電壓(有源蜂鳴器)或者方波(無源蜂鳴器)就可以發聲,其主要參數是外形尺寸、發聲方向、工作電壓、工作頻率、工作電流、驅動方式(直流/方波)等。這些都可以根據需要來選擇。
2.續流二極體
蜂鳴器本質上是一個感性元件,其電流不能瞬變,因此必須有一個續流二極體提供續流。否則,在蜂鳴器兩端會產生幾十伏的尖峰電壓,可能損壞驅動三極體,並干擾整個電路系統的其它部分。
3.濾波電容
濾波電容C1的作用是濾波,濾除蜂鳴器電流對其它部分的影響,也可改善電源的交流阻抗,如果可能,最好是再並聯一個220uF的電解電容。
4.三極體
三極體Q1起開關作用,其基極的高電平使三極體飽和導通,使蜂鳴器發聲;而基極低電平則使三極體關閉,蜂鳴器停止發聲。
驅動設計
由於這裡要介紹兩種驅動方式的方法,所以在設計模組系統中將兩種驅動方式做到一塊,即程式裡邊不僅介紹了PWM輸出口驅動蜂鳴器的方法,還要介紹I/O口驅動蜂鳴器的方法。所以,我們將設計如下的一個系統來說明單片機對蜂鳴器的驅動:系統有兩個他激蜂鳴器,頻率都為2000Hz,一個由I/O口進行控制,另一個由PWM輸出口進行控制;系統還有兩個按鍵,一個按鍵為PORT按鍵,I/O口控制的蜂鳴器不鳴叫時按一次按鍵I/O口控制的蜂鳴器鳴叫,再按一次停止鳴叫,另一個按鍵為PWM按鍵,PWM口控制的蜂鳴器不鳴叫時按一次按鍵PWM輸出口控制的蜂鳴器鳴叫,再按一次停止鳴叫。電路原理圖
 蜂鳴器
蜂鳴器使用SH69P43為控制晶片,使用4MHz晶振作為主振盪器。
PORTC.3/T0作為I/O口通過三極體Q2來驅動蜂鳴器LS1,而PORTC.2/PWM0則作為PWM輸出口通過三極體Q1來驅動蜂鳴器LS2。另外在PORTA.3和PORTA.2分別接了兩個按鍵,一個是PWM按鍵,是用來控制PWM輸出口驅動蜂鳴器使用的;另一個是PORT按鍵,是用來控制I/O口驅動蜂鳴器使用的。連線按鍵的I/O口開內部上拉電阻。
軟體設計方法
先分析一下蜂鳴器。所使用的蜂鳴器的工作頻率是2000Hz,也就是說蜂鳴器的驅動信號波形周期是500μs,由於是1/2duty的信號,所以一個周期內的高電平和低電平的時間寬度都為250μs。軟體設計上,我們將根據兩種驅動方式來進行說明。
a)PWM輸出口直接驅動蜂鳴器方式
由於PWM只控制固定頻率的蜂鳴器,所以可以在程式的系統初始化時就對PWM的輸出波形進行設定。
首先根據SH69P43的PWM輸出的周期寬度是10位數據來選擇PWM時鐘。系統使用4MHz的晶振作為主振盪器,一個tosc的時間就是0.25μs,若是將PWM的時鐘設定為tosc的話,則蜂鳴器要求的波形周期500μs的計數值為500μs/0.25μs=(2000)10=(7D0)16,7D0H為11位的數據,而SH69P43的PWM
輸出周期寬度只是10位數據,所以選擇PWM的時鐘為tosc是不能實現蜂鳴器所要的驅動波形的。
這裡我們將PWM的時鐘設定為4tosc,這樣一個PWM的時鐘周期就是1μs了,由此可以算出500μs對應的計數值為500μs/1μs=(500)10=(1F4)16,即分別在周期暫存器的高2位、中4位和低4位三個暫存器中填入1、F和4,就完成了對輸出周期的設定。再來設定占空比暫存器,在PWM輸出中占空比的實現是
通過設定一個周期內電平的寬度來實現的。當輸出模式選擇為普通模式時,占空比暫存器是用來設定高電平的寬度。250μs的寬度計數值為250μs/1μs=(250)10=(0FA)16。只需要在占空比暫存器的高2位、中4位和低4位中分別填入0、F和A就可以完成對占空比的設定了,設定占空比為1/2duty。
以後只需要打開PW輸出,PWM輸出口自然就能輸出頻率為2000Hz、占空比為1/2duty的方波。
b)I/O口定時翻轉電平驅動蜂鳴器方式
使用I/O口定時翻轉電平驅動蜂鳴器方式的設定比較簡單,只需要對波形分析一下。由於驅動的信號剛好為周期500μs,占空比為1/2duty的方波,只需要每250μs進行一次電平翻轉,就可以得到驅動蜂鳴器的方波信號。在程式上,可以使用TIMER0來定時,將TIMER0的預分頻設定為/1,選擇TIMER0始終為系統時鐘(主振盪器時鐘/4),在TIMER0的載入/計數暫存器的高4位和低4位分別寫入00H和06H,就能將TIMER0的中斷設定為250μs。當需要I/O口驅動的蜂鳴器鳴叫時,只需要在進入TIMER0中斷的時候對該I/O口的電平進行翻轉一次,直到蜂鳴器不需要鳴叫的時候,將I/O口的電平設定為低電平即可。不鳴叫時將I/O口的輸出電平設定為低電平是為了防止漏電。
電子產品介紹
| 電子產品在不同發展水平的國家有不同的內涵,在同一國家的不同發展階段有不同的內涵,電子產品被越來越多的套用到我們的生活中了,現在就讓我們一起認識一下這些有關的電子產品吧。任務提示1、任務由用戶參加,只要編輯任務詞條,即視為領取該任務;2、在任務目標達到的前提下,會顯示用戶信用排名前50名。 |
