
不同重力測量方法
傳統的地面靜態重力測量技術儘管能夠獲取地球重力場的高頻信息,但受地形等客觀因素制約,不僅效率低下,而且只能局限於陸地上的部分地區。
船載重力測量技術作為一種動態重力測量方法,是近20多年來採集海洋局部重力數據的主要手段,其特點是因載體運動速度低且行駛在一個平均海面上,僅靠測量系統硬體方面的阻尼和合適的低通濾波技術,便可達到所要求的精度,然而正因其速度慢且只能限于海面作業,仍是一種低效的重力測量方法。
航空重力測量是以飛機為載體,綜合套用重力儀(或加速度計)、INS、GPS和測高、測姿設備測定近地空中重力加速度的重力測量技術。與地面重力測量相比,航空重力測量不僅快速經濟,而且能夠在一些難以開展地面重力測量的特殊區域如沙漠、冰川、沼澤、高山、森林等進行作業。由於航空重力測量大體上是利用兩種觀測量的時間序列之差值來確定重力場信息,因此它是一種適宜採用頻譜分析的方法 。
傳統的地面靜態重力測量方法能夠獲取地球重力場的高頻信息,但受地形等客觀因素制約,不僅效率低,而且只能局限於陸地上的部分地區。船載重力測量是採集海洋重力數據的主要方法,其特點是因載體運動速度低而且行駛在一個平均海面上,因此僅靠測量系統硬體方面的阻尼和合適的低通濾波技術,便可達到所要求的精度,但只能限于海面作業。儘管衛星重力測量技術能夠測定全球重力場,但其仍只能測定地球重力場的中長波分量,測定高頻重力場信息,仍需依賴於傳統的重力測量技術 。
航空重力測量基本原理
 航空重力測量
航空重力測量 航空重力測量
航空重力測量 航空重力測量
航空重力測量 航空重力測量
航空重力測量原理上,重力是利用加速度計測得的。典型的加速度計通常包括試驗質點、彈性約束物(如彈簧)和外殼等部分。試驗質點由約束物支撐,只能沿著某一敏感軸方向運動,當受到加速度時,相對其平衡位置產生位移。加速度計的輸出是一組電信號,其大小與位移成正比。根據牛頓第二定律,試驗質點在慣性參考系(i)中的運動方程為:,式中,為比力矢量,即加速度計的觀測量,為試驗質點在慣性坐標系中的位置矢量,為引力加速度矢量 。
原理上航空重力測量需要解決兩個基本問題:1.運動狀態下,在空中如何維持感測器的穩定指向?2.如何分離引力加速度和慣性加速度?
 航空重力測量方法
航空重力測量方法關於第一個問題,大概有四種不同的解決方案,其中三種採用慣性感測器進行姿態穩定,一種採用GPS多天線系統。
關於第二個問題,有兩種不同的解決途徑。一是採用兩個不同的加速度測量系統,其中一個的輸出中含有引力加速度,而另一個不含,於是在同一坐標系中對兩組加速度輸出求差,即可消去共同的載體運動加速度,剩下的差值中就是引力加速度和系統誤差的影響。如果僅要求測定垂直加速度,可採用氣壓測高儀或雷射測高儀(海面、大型湖面上)代替其中的GPS。第二種分離方法是通過共用基線的兩個加速度計的輸出值求差,以消去載體運動的影響。如果共用基線是旋轉穩定的,由差值讀數可以獲得重力梯度分量,這就是重力梯度測量的基本原理 。
航空重力測量系統
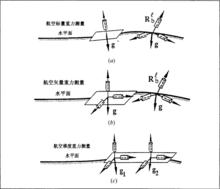
航空重力測量系統通常應當包括如下三個部分,即用於測量比力的加速度計(或重力儀,稱之為重力感測器分系統)、使加速度計保持水平的系統(或計算其姿態,稱為平台分系統)和測量飛機慣性加速度的定位分系統 。為便於表述,習慣上按照航空重力測量的複雜程度,將航空重力測量分為航空標量重力測量、航空矢量重力測量和航空梯度重力測量三類。
航空標量重力測量僅確定重力異常矢量的大小。依據所使用的重力感測器和平台分系統的不同,分為平台式、捷聯式和旋轉不變式。平台式是將精密加速度計安裝到穩定平台上,定向由穩定平台維持,引力加速度與慣性加速度的分離採用求差方法。捷聯式系統採用數學平台,垂直加速度計是主要重力感測器,引力加速度與慣性加速度的分離仍採用求差方法。旋轉不變式系統採用三軸加速度計,理論上不存在定向問題,而是利用三個加速度計的輸出計算重力的大小。
航空矢量重力測量同時確定重力異常矢量的大小和方向,分為平台式和捷聯式,其原理與標量類似。
航空梯度重力測量是利用同一穩定平台上的兩組三軸加速度計測定異常位的二階梯度,因此空中定向由穩定平台維持 。
航空重力測量研究現狀及發展
航空重力測量技術的發展是伴隨著其三個主要組成部分的發展而發展的。在1990年以前,由於受限於所用設備的精度,航空重力測量並未取得實質性成果;在此之後,隨著動態差分GPS(DGPS)技術的成功套用,航空重力測量的成功試驗遂成現實。進入二十世紀九十年代以來,標量重力測量系統的發展主要涵蓋以下六個方面:
傳統航空重力測量系統的改進
傳統航空重力測量系統採用改進後的船載重力儀(如LaCoste&Romberg、Bell重力儀),現已比較成熟,並作為一種標準方法用來獲取中、高解析度重力信息(即半波長大於5km)。由於軟體和硬體的改進,自二十世紀九十年代中期,這種系統的精度已由5mGal(10km的半波長)提高到約2mGal(半波長為6km),甚至達到1mGal(半波長為5km)。
新型系統方案的研究
近十年來,基於慣性技術和DGPS組合的新型系統方案的研究取得了進展。莫斯科慣性技術中心(ITC)、加拿大卡爾加里大學和卡爾加里Canagrva公司合作首次對慣性穩定平台系統進行了試驗,並由ITC以航空的方式進行了作業。類似於該系統,Sander地球物理公司於1999年完成了另一個名為AIRGrav系統的研製。這些系統均提供於商業用途,而且表明可獲得0.5一1.5mGal的中、高頻的重力場估值。
從DGPS中導出加速度的理論和方法
至二十世紀九十年代中期,人們普遍認為,在良好的環境條件下,對於905濾波周期,利用DGPS可以1一2mGal的精度導出運動平台的加速度。儘管如此,若欲同時提高精度和加大系統的頻寬,則在與航空重力相關的頻帶上,由DGPS引起的誤差仍是研究的主要障礙,況且,良好的環境條件實際上往往難以得到保證。因此,在確定加速度時,需要對DGPS誤差所造成的影響做更詳細的研究,並尋求更好的模型和方法解決系統的頻寬問題。
濾波和估算方法
當航空重力系統的頻帶加寬時,要在消除感測器和動態條件下引起的噪聲的同時,保持幅度較小的完整重力信號是困難的。當信噪比很低及處理與飛機運動相關的噪聲時,需要高級的濾波技術和估算方法。
向下延拓方法研究
航空重力測量得到的是航線高度上的擾動重力或重力異常。對大地測量領域的許多套用來說,通常要將其格網化並歸算到地面或大地水準面上,然後才能依照物理大地測量邊值問題的方法推求大地水準面高及其它擾動重力場元。空中重力異常向下延拓的基本方法是求解Poisson積分方程,稱為逆Poisson方法。
航空重力數據的套用研究
一些國家和國際的研究項目或工程項目中均含有航空重力測量系統,其目的是利用航空重力數據估算大地水準面,以滿足測圖或勘探需要。NRL在其航空地球物理工程中的目標是獲取大面積的、中等解析度的航空重力測量數據。迄今已在格林蘭島、南極洲西部和北極地區成功地進行了大規模的航空重力測量。利用這些數據確定的近海區域的相對大地水準面的精度為3一5cm,空間解析度約為IOkm,相應的絕對大地水準面的精度約為10cm 。
