
線性調節器
正文
用於控制線性對象的調節器,它使系統狀態和控制變數在控制過程中的給定二次型時間積分達到最小值,又稱線性最優調節器。線性調節器的反饋規律也是線性的。它與被控對象一起構成線性二次型最優調節系統。求解線性調節器的調節(反饋)規律稱為線性調節器問題,已有一套完整的設計方法。線性調節器有較大的穩定裕度、並對系統模型的誤差有較強的魯棒性,廣泛用於生產過程的控制。線性調節器問題的特點是:①被控對象的狀態方程是線性的(可以是定常的或時變的):

 +uT(t)Ru(t)】dt
+uT(t)Ru(t)】dt
線性調節器可以分為有限時間調節器和無限時間調節器兩類。
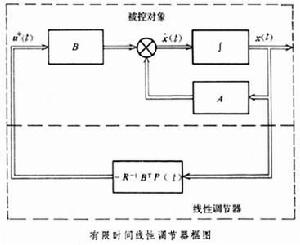
有限時間調節器 指控制過程結束時間 τ為有限值時的線性調節器。它的調節規律的表達式為
u*(t)=-R-1BTP(t)x(t)
式中R-1為逆矩陣,而 P(t)可由求解如下形式的黎卡提矩陣微分方程來確定:
 線性調節器
線性調節器u*(t)=-R-1BTPx(t)
式中P由求解下列黎卡提矩陣代數方程來定出:PA+ATP-PBR-1BTP+Q=0
無限時間調節器也是由線性狀態反饋構成的。與有限時間調節器不同,無限時間調節器當被控對象為定常時也一定是定常的。參考書目
B.D.O.安德森、J.B.莫爾著,龍雲程譯:《線性最優控制》,科學出版社,北京,1982。(B.D.O. Anderson, J.B.Moore, Linear Optimal Control, Prentice-Hall, 1971.)
