
基本性能
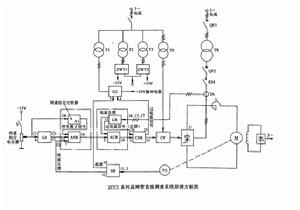 系統框圖
系統框圖裝置在長期額定負荷下,允許150%額定負荷持續二分鐘,200%額定負荷持續10秒鐘,其重複周期不少於1小時。
裝置在交流進線端的電壓為(0.9~1.05)380伏時,保證裝置輸出端處輸出額定電壓和額定電流。
電網電壓下降超過10%範圍時輸出額定電壓同電源電壓成正比例下降。
裝置在採用轉速反饋情況下,調速範圍為20∶1,在電動機負載從10%~100%額定電流變化時,轉速偏差為最高轉速的0.5%(最高轉速包括電動機弱磁的轉速)。
轉速反饋元件採用ZYS型永磁直流測速發電機。
裝置在採用電動勢反饋(電壓負反饋、電流正反饋)時,調速範圍為10∶1,電流負載從10%~100%變化時,轉速偏差小於最高轉速的5%(最高轉速包括電動機弱磁的轉速)。
裝置在採用電壓反饋情況下,調壓範圍為20∶1,電流負載從10%~100%變化時,電壓偏差小於額定電壓的0.5%。
裝置給定電源精度,在電源電壓下降小於10%以及溫度變化小於±10℃時,其精度為1%。
主迴路
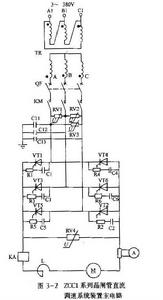 主迴路
主迴路ZCC1系列裝置主迴路設有過電壓保護和過電流保護。交直流側過電壓保護採用阻容過電壓和氧化鋅壓敏電阻器。晶閘管換相過電壓保護採用阻容過電壓吸收器。過電流保護有快速熔斷器、電子過電流保護以及過電流繼電器。電動機勵磁迴路設有過電壓保護和失磁保護。
控制迴路
觸發電路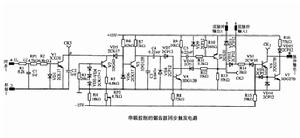 觸發電路
觸發電路鋸齒波形成與移相環節:鋸齒波形成環節由C2、V1、V2、R3、R4、R5、RP2、VD2、VD3、VD4等組成。V2、R3、R4、R5、VD2、VD3、VD4等組成恆流電路。V2的基極典韋由R3、VD2、VD3、VD4、R4組成的固定分壓電路決定,則V2的發射極點位也是固定的,發射極電流IE2由此固定電壓除以電阻R5與RP2得到,是恆定的電流。
調節RP2阻值就可以改變恆流電流值,即改變電容器C2的充電電流值,從而改變鋸齒波電壓的斜率。電容器C2的充放電由V1控制,V1截止時恆定電流ic2對電容器C2進行充電,電容器兩端電壓隨時間t按線性增長,極性為下正、上負,而V1導通時,電容器C2進行放電,電容器兩端電壓為零。V1的狀態受濾波後的同步電壓控制us’。us’在為正半周時,V1截止,電容器C2充電,電容兩端電壓按線性增大;在us’為負半周時,V1導通,電容器C2放電,電容器兩端電壓為零。由此在電容器C2上即得到頻率與電源相同的鋸齒波同步信號。
 鋸齒波同步觸發電路波形
鋸齒波同步觸發電路波形脈衝形成與整形環節:該環節主要由V3、V4、V5組成。當V3從導通變為截止時,V3集電極電位上跳約為15V,通過C4輸出一個正脈衝,送到V4基極,對V4、V5組成的單穩態電路進行觸發。在脈衝來之前的穩態時,V4、V5都處於截止狀態;當V4得到正脈衝後,由截止變為導通,V4集電極電位下降,通過R11、C5使V5獲得基極電流而導通。V5導通後通過R12、VD10對V4引進正反饋,使V4、V5迅速進入飽和導通。V5導通時,其集電極輸出的脈衝經VD12送向功放級,由於正反饋的作用使得輸出的脈衝前沿變陡。R12、VD10的另一個作用是在C4充電結束後正脈衝消失後向V4提供基極電流,使V4仍能導通。在V4導通後,+15V電源經R10、R11、V4開始對電容C5進行充電,使C5兩端電壓增大,V5飽和導通,V5集電極電位開始下降,由它提供的V4的基極電流隨之減小,不能在維持V5飽和導通,V5集電極電位開始下降,由他提供的V4的基極電流隨之減少使V4開始脫離飽和和導通狀態,V4集電極電位開始上升,V5基極電流進一步下降,V5集電極電位也進一步下降,從而使V5和V4迅速截止,V5集電極輸出的觸發脈衝結束,單穩態電路的暫穩態結束。因此,觸發脈衝寬度取決於C5、R11、R10數值。在V3導通,V4、V5截止時,C4經V3、VD8放電,C5經VD9、R9放電,為下一次產生脈衝做好準備。
雙脈衝形成與放大環節:從V5的集電極輸出的脈衝,經VD12輸入脈衝功放級V6、V7,同時又通過VD11從雙脈衝輸出端給前一相觸發電路輸出一個補脈衝。同樣,經過雙脈衝輸入端從後一相觸發電路輸入一個在相位上滯後60°的補脈衝,因此在VD12的陰極得到相位差為60°的雙脈衝。從VD12的陰極得到的雙脈衝經R14、穩壓管VS1、V6、V7脈衝功放級放大後去驅動脈衝變壓器輸出觸發脈衝。給定積分電路
 給定積分電路
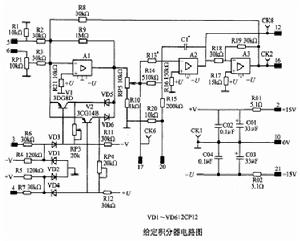
給定積分電路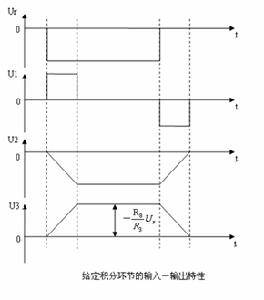 給定積分輸出特性
給定積分輸出特性N2為積分電路,其積分時間常數為電阻器R13和R14的並聯值與電容器C1的乘積。由於積分電路的輸入電壓為恆定值,故積分電路的輸出電壓u2為一個先行變化的斜坡信號,調整RP5、U1、R13、R14、C1都可以調整輸出電壓斜率。調整電阻器R13、R14和C1可粗調積分時間常數。N3為反相器,將N2的輸出信號反向後送到N1的輸入端,以保證其與N1的給定輸入極性相反而成為負反饋。速度調節單元
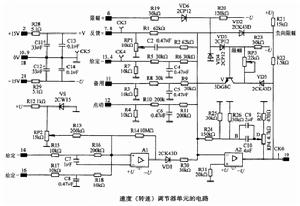 速度調節器
速度調節器速度調節器單元包括由集成放大器N1組成的電平檢測器和N2組成的調節器兩個部分。由轉速給定電位器取出的給定信號直接送到速度調節器單元的14號端,即N1電平檢測器的輸入端;而給定積分電路的輸出給定信號則送到13號端,即N2速度調節器的輸入端。電平檢測器是由集成運放N1加上正反饋形成,它具有繼電特性,有一定的迴環寬度,用以鑑別是否有速度給定。當給定信號小於0.2V時,由於N1從電位器RP2獲得正向偏壓,所以N1輸出最大電壓。該輸出電壓同二極體V1加到N2速度調機器,使N2速度調節器迅速輸出負向限幅電壓,通過電流調節器輸出1個推β信號,使觸發器產生的觸發脈衝處於βmin,系統處於可靠的停機狀態。當14號端接收到的速度給定信號幅值大於0.2V時,N1電平檢測器迅速翻轉輸出為負,由於二極體VD1的阻擋作用,使得不再有正向偏壓加至N2速度調節器,從而接觸了封鎖,使N2速度調節器迅速退出負飽和,並開始按速度偏差信號進行PI調節。
調節器輸出電壓正限幅採用三極體反饋限幅方式,調節電位器RP3來改變正向電壓限幅值。調節器輸出電壓附限幅採用二極體反饋限幅方式,負向電壓限幅值固定為-2V。電流調節器單元
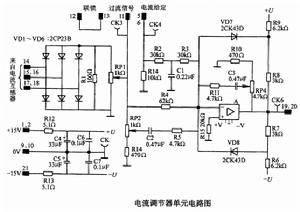 電流調節器
電流調節器電流調節器單元包括VD1~VD6所組成的電流檢測變換電路和集成放大器N組成的電流調節器兩個部分。二極體VD1~VD6組成三相整流橋,接收來自二次側額定電流為0.1A的交流電流互感器的信號,並將其變換成直流電壓,作為電流反饋電壓輸出到電流調節器,電流負反饋電壓的大小可調節電位器RP1。為防止電流互感器二次側開路而引起電壓衝擊,通過12號端和13號端設定了與主電路合閘的連鎖關係,只有當電流調節器單元板插在印板插座中時,主電路才能接通。
來自速度調節器的輸出信號有5號端接入電流調節器作為電流環的給定信號,在該輸入端有R2、R3、C1組成的T形濾波器。電流反饋信號與給定信號比較後的電流偏差信號由調節器進行PI調節。為加快對電網波動的調節作用,在電流反饋輸入端同時還帶有由C2、R5引進的電流微分負反饋。電流調節器的輸出通過19號端、20號端送往觸發輸入單元的3號端。電流調節器輸出電壓的正、負限幅均採用二極體反饋限幅方式。保護電路及觸發輸入(CSR)
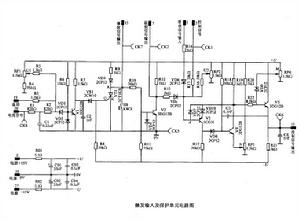 保護電路
保護電路觸發輸入電路:觸發輸入電路在本系統中主要的作用是進行電平變換。電流調節器輸出的信號電壓極性根據實際控制情況的不同有正、有負,而觸發電路只能在正的移相控制信號電壓下工作。因此,要用觸發輸入電路將來自電流調節器輸出的正負信號電壓變換為正輸出信號電壓,以適應觸發電路的移相控制信號電壓的要求。
電流調節器輸出電壓UK從本電路板的三號端輸入,它與電位器RP2上取得的電壓U2進行疊加,在V3的基極A點得到電位UA。電路中,RP4活動端取出的電壓為UM,RP3活動端取出的電壓為UN,當UN<UA<UM時,電晶體V3、V4、V5都工作線上性放大區。如果忽略三極體發射極和基極的壓降及二極體的正向壓降,同時考慮到V5的基極電流通常只有幾十微安,在R22上的壓降也可忽略,這樣,從13號端輸出的移相控制信號電壓Uct便能計算出,調節電位器RP2使偏移電壓U2的大小變化,就可以改變觸發輸入單元輸出的移相控制信號電壓Uct的大小,使其滿足觸發電路的需要。
除了電平變換作用外,本電路還具有設定觸發脈衝初始相位α、Uctmin和Uctmax的限制功能。在3號端輸入電壓UK=0時,可通過調節電位器RP2調整偏移電壓U2的大小,即可改變系統的觸發脈衝的初始相位角α0,使其處於α=90°或其他所需值。當3號端輸入控制電壓UK負向增大時,V3飽和導通,其集電極電位UC3升高,VD8截止,正電壓通過R18為V4的基極提供飽和基極電流,V4飽和導通,Uce4≈0,Uc4=Ue4=UN,所以Uct=Ub5=UN。因此,即使輸入電壓UK負向電壓繼續增加,13號端的輸出電壓Uct不變,Uctmin= UN。輸出電壓Uctmin對應於觸發電路控制角αmin。調整電位器RP3可改變Uctmin的值,即改變αmin。當三號端輸入控制電壓UK正向增加時,Ub5、Uc4也隨之上升,當Ub5、Uc4>UM時,VD9導通,Uct=Ub5= Uc4=UM,即使UK繼續增大,使Ub3也隨之上升,而Uct卻保持UM不變,即Uctmax=UM。輸出電壓Uctmax對應於觸發電路控制βmin。調整電位器RP4可改變Uctmax的值,即改變βmin。速度變換器
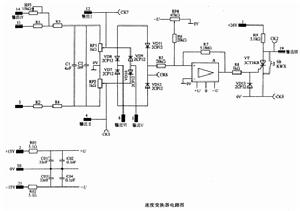 速度變換器
速度變換器直流測速發電機的電壓從10號端和3號端輸入。輸入信號經電阻器R1~R4降壓後,從12號端和4號端分別可輸出相反極性的轉速反饋電壓,具體可根據控制系統要求轉速反饋電壓的極性選用,本系統中選用12號端輸出正極性的轉速反饋電壓。該轉速反饋電壓大小可分別調節電位器RP1、RP2,一般調整到±8V。另外,二極體VD7~VD10整流後,從6號端輸出恆正電壓,從5號端輸出恆負電壓,可供弱磁系統使用;從14號端輸出與測速發電機電壓成正比例的轉速信號電壓供轉速表用。ZCC1系統要求使用的測速發電機最大直流電壓在50~200V之間,當測速發電機最大輸出直流電壓低於110V時,電阻器R1和R2應短接以減小衰減量。
超速保護電路由集成運放N構成的電壓絕對值檢測器和小晶閘管VT組成帶有記憶功能的電平檢測器電路。轉速反饋電壓經二極體VD11或VD12整流變成正絕對值轉速反饋電壓,與偏執電壓進行比較後送集成放大器N的同相輸入端。正常時轉速反饋電壓幅值小於電位器RP4上取出的偏置值,比較器輸出負向電壓,小晶閘管VT關斷,輸出19號端為高電平。一旦超速發生,轉速反饋電壓即大於電位器RP上取出的偏置值,則比較器輸出正向電壓,小晶閘管VT導通,輸出19號端為低電平。電源及故障綜合電路
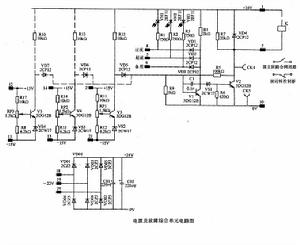 電源及故障綜合電路
電源及故障綜合電路觸發電源由三相交流22V電源經VD01~VD06整流,電容C01、C02濾波後輸出+24V,供觸發裝置使用。過電流、超速信號電壓分別經4號端與5號端輸入,正常時輸入均為“1”,三極體V2導通,外接繼電器K吸合,其動合觸點串聯在主迴路合閘迴路中,K吸合時主迴路能正常接通,此時三極體V1基極通過V2集電極反饋電阻器R5得到低電平而使V1截止。當發生過電流或超速時,4號端或5號端上出現“0”,對應發光二極體點亮以指示故障種類;同時VD1或VD2導通,使V1集電極電位變為低電平,V2截止,繼電器K失電,其動合觸點釋放出事故信號,使主迴路斷開。±15V工作電源接2號端和21號端,正常時V3導通,V3集電極電位低於零電位,不影響V1、V2狀態。當±15V電源中任意一個電壓過低時,均使V3截止,其集電極電位變為高電平而使V1導通,V2截止,繼電器K亦失電釋放,發出故障信號。
電路綜合分析
停車狀態電動機停車時,開關S打開,給定電壓Ugn=0,速度(轉速)調節器單元中A1速度比較器輸出一個大於+8V的推β信號電壓,使速度(轉速)調節器輸出電壓為負向限幅值-Ugi,電流調節器輸出電壓為正向限幅值UKmax,通過觸發輸入單元CSR、觸發器CF,使晶閘管變流器控制角處於最小逆變角βmin,電動機處於停車狀態。
電動機正向啟動運行當開關S閉合,給出負的正向速度給定電壓(Ugn=-),當速度給定電壓Ug>0.2時A1速度比較器迅速翻轉輸出為負電壓,使速度(轉速)調節器迅速退出負限幅值-Ugi並開始按速度偏差信號進行P、I調節。經積分給定器使給出負的給定電壓變成線性變化的負的給定電壓Ugn。速度(轉速)調節器的輸入偏差△Un=Ugn-Ufn,其極性為負。由於轉速反饋電壓Ufn受機械慣性影響,增加較慢,所以速度(轉速)調節器的輸出Ugi為正的限幅值。該輸出電壓Ugi是電流調節器的電流給定電壓,電流調節器輸入電壓△Ui=Ugi-Ufi,極性為正,因而電流調節器的輸出電壓UK為負。經過觸發輸入單元CSR-1,觸發器CF-1使晶閘管變流器的控制角從βmin向前移動使α<90°,晶閘管變流器工作於整流狀態,電動機正向啟動。以後啟動過程和前面所述的速度電流雙閉環調速系統啟動過程一樣,不再重複。穩態運行時,速度反饋電壓Ufn基本上等於速度給定電壓Ugn,速度(轉速)調節器的輸出電壓Ugi基本上與負載電流反饋電壓Ufi相等。
減速(或停車)正向減速時速度給定值減小,極性不變仍為負給定電壓,而電動機轉速來不及改變,所以速度(轉速)調節器的輸入端偏差△Un=Ugn-Ufn為正,速度(轉速)調節器ASR的輸出Ugi為負的限幅值,使電流調節器的輸出電壓UC為正,經過觸發輸入單元CSR,觸發器CF使晶閘管變流器的控制角從α<90°迅速後移至βmin,主迴路電流經本橋逆變後很快衰減到零。對於不可逆系統由於晶閘管變流器只能提供一個方向的電流,電動機只在負載阻力矩作用下減速,直至電動機轉速降至接近新的給定值時,由於速度微分反饋的提前作用使速度給定值Ugn重新大於速度反饋值Ufn,速度(轉速)調節器輸出開始退出負的限幅值,電流調節器輸出從正的最大值向負電壓變化,觸發器CF的觸發脈衝從βmin開始前移,電流環和速度(轉速)環相繼投入閉環工作,晶閘管變流器控制角α<90°工作在整流狀態,電動機在新的給定值下運行。
當正向停車時速度給定電壓Ugn=0(<0.2V時),速度(轉速)調節器單元中A1速度比較器輸出一個大於+8v的推β信號電壓,使速度(轉速)調節器輸出為負向限幅值-Ugi,電流調節器輸出為正向限幅值+Ucmax,使晶閘管變流器控制角迅速後移到βmin,電動機在阻力矩作用下減速至停車。
