
介紹
 多視圖幾何
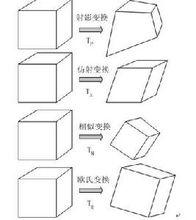
多視圖幾何多視圖幾何(Multiple View Geometry)多視圖幾何主要研究用幾何的方法,通過若干幅二維圖像,來恢復三維物體。間言之就是研究三維重構,主要套用與計算機視覺中。三維重構,即如何從靜止物體不同視點下的圖像中恢復物體三維幾何結構信息。在三維重構的過程中攝像機標定是一個極其重要環節,攝像機標定的研究分為三個部分:(1)基於場景結構信息的標定;(2)基於攝像機主動信息(純旋轉)的自標定;(3)不依賴場景結構和攝像機主動信息的自標定。
流行原因
當前計算機的性能價格比大大提高,使人們有條件在視覺系統中使用更多的攝像機,以利用冗餘的信息,來換取系統對噪聲的魯棒性。系統對噪聲的魯棒性一直是實用計算機視覺系統的瓶頸問題,解決該問題的可能的辦法是:提高攝像機的解析度、多攝像機方法和近年來大量引進的統計最最佳化魯棒算法。
若干概念
計算機視覺
人類感知外界環境信息主要是通過視覺來實現的,使計算機或機器人具有類似於人類的視覺功能,是人類長期的夢想。隨著計算機技術和信號處理理論的發展,人們開始嘗試利用攝像機拍攝環境圖像並將其存儲到計算機中,然後讓計算機完成視覺信息處理的全過程,由此就產生了一門新興的學科——計算機視覺。計算機視覺的研究目標是使計算機具有通過二維圖像認知三維環境信息的能力。這種能力將不僅使計算機能感知三維環境中的幾何信息,包括它的形狀、位置、姿態、運動等,而且能對它們進行描述、存儲、識別與理解。計算機視覺使用的理論方法主要是射影幾何、剛體運動力學、機率論與隨機過程、圖像處理以及人工智慧等理論。
三維重構
 針孔攝像機幾何
針孔攝像機幾何三維重構是計算機視覺領域中一個至關重要的經典問題,也是用計算機模擬人眼視覺功能所需要完成的最後一步,即恢復物體的三維信息。三維重構的用途很廣,可以套用在機器人導航,視覺監控,建築製造等行業。同時在最近幾年興起的計算機虛擬現實,基於圖像的繪製(IBR),三維動畫等技術中都有廣泛的套用。在未來幾年中它仍然是計算機視覺的重要研究方向之一。
攝像機標定
 對極幾何
對極幾何攝像機標定是計算機視覺領域中從二維圖像獲取三維歐氏空間信息必不可少的關鍵一步,攝像機標定結果的好壞直接決定著三維重構結果的好壞,所以,研究攝像機的標定方法具有重要的理論研究意義和重要的實際套用價值。空間景物點與其圖像中的像點之間存在著一一對應的關係,它們的位置關係由攝像機成像幾何模型所決定。該幾何模型的參數稱為攝像機內參數,這些參數必須由實驗與計算來確定,實驗與計算的過程稱為攝像機標定。
