基本概念
控制系統的數學模型
在控制系統的分析和設計中,首先要建立系統的數學模型。控制系統的數學模型是描述系統內部物理量(或變數)之間的關係的數學表達式。
運動方程
在靜態條件——變數各階導數為零——下描述變數之間關係的代數方程叫靜態數學模型;
描述變數各階導數之間的關係的微分方程叫動態數學模型,這些方程就是運動方程。
運動方程的階次是指運動方程中出現的最高階導數的階次,如N階運動方程就是指方程中出現的最高階導數是N階的。
低階系統
低階系統是指一階或二階系統,即以一階微分方程或二階微分方程為運動方程的控制系統。在工程實踐中,雖然低階系統的實例較少,但是有些高階系統的特性可以由低階系統來近似表征 。
高階系統
高階系統是指三階或三階以上的系統,即以三階或三階以上的微分方程作為運動方程的控制系統。在控制系統中,幾乎所有系統都是高階系統。
高階系統時域分析
高階系統的單位階躍回響
 高階系統
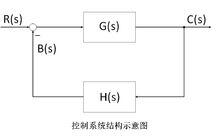
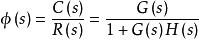
高階系統對一般的控制系統,如右圖所示,其閉環傳遞函式為
 高階系統
高階系統高階系統可以表示為
 高階系統
高階系統當採用解析法求解高階系統的單位階躍回響時,應將上式分子分母多項式分別進行因式分解,再進行反拉氏變換。然後可採用高次代數方程的近似求根法求解。但是高階系統的階次越高,這種傳統方法的求解就越難。在實際的套用中,一般使用MATLAB 軟體對高階系統進行時域分析。
高階系統的動態性能
在控制系統的實踐中,通常要求控制系統既具有較快的回響速度又具有一定的阻尼程度,此外,還要求減少死區、間隙和庫倫摩擦等非線性因素對系統性能的影響,因此高階系統的增益常常調整到使系統具有一對閉環共軛主導極點。這時,可以用二階系統的動態性能指標來估算高階系統的動態性能。
高階系統的簡化
通常我們研究的控制系統的瞬態回響是較為簡單的一階和二階系統,但實際系統通常是高階系統。有時為方便計算,在能夠滿足一定的精度的情況下,需要把高階系統的回響簡化成低階系統來近似模擬。
通常高階系統的簡化有兩種方法 :
一種是保留原極點的方法 ,另外一種是不保留原主導極點的方法。
保留原主導極點是通過刪除傳遞函式中不太明顯的主導極點以達到簡化的效果,與其他極點相比,若一個極點具有絕對值很大的負實部,則它對瞬態回響不會產生太明顯的影響。這種簡化十分簡單,但當無法區分出合適的主導極點時,就不能使用這種方法。
不保留極點簡化法較為複雜,主要原則是保證降階後的系統的頻率回響儘可能接近原系統的頻率相應。
