
簡介
自動控制理論中建立在頻率回響法和根軌跡法基礎上的一個分支,經典控制理論的研究對象是單輸入、單輸出的自動控制系統,在現代控制理論中,控制系統的基本結構和經典控制理論一樣,仍然是由受控對象和反饋控制器兩部分構成的閉環系統。不過在經典理論中習慣於採用輸出反饋控制,而在現代控制理論中則更多地採用狀態反饋控制。
定義
輸出反饋控制是採用輸出矢量Y構成線性反饋律。在經典控制理論中主要討論這種反饋形式。以輸出作為反饋量來構成反饋律,實現對系統的閉環控制,從而達到期望的系統性能指標。
 輸出反饋控制
輸出反饋控制受控系統 =(A,B,C,D)
x=AX+Bu
y=Cx+Du
 輸出反饋控制
輸出反饋控制或 0=(A,B,C)
x=Ax+Bu
y=Cx
輸出線性反饋控制律為
U=Hy+v
式中H為r乘以m維輸出反饋增益陣。對單輸出系統,H為r乘以1維列矢量。
u=H(Cx+Du)+v=HCx+HDu+v
若D=0,則
x=(A+BHC)+Bv
y=Cx
由上式可見,通過選擇輸出反饋增益陣H也可以改變閉環系統的特徵值,從而改變系統的控制特性。
方法
輸出反饋控制的表示很簡單,但求解過程卻十分複雜。目前主要有頻域法、多項式法、狀態空間法。
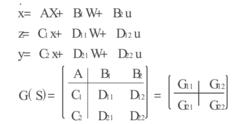
設廣義受控對象的狀態空間實現為:
 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制X , , , , , ,Dij具有相應維數。
假設:
1、(A、B2)是能穩定的,而(C2、A)是能檢測的;
2、D12為列滿秩,且存在矩陣(D12,D⊥),使得(D12,D⊥)為正交陣。
3、
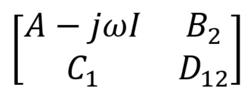 輸出反饋控制
輸出反饋控制 輸出反饋控制
輸出反饋控制對所有的ωR均為列滿秩。
4、
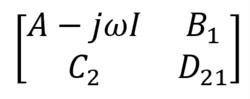 輸出反饋控制 輸出反饋控制
輸出反饋控制 輸出反饋控制對所有的ωR均為列滿秩。
狀態反饋陣:
 輸出反饋控制
輸出反饋控制對比
狀態反饋控制就是指系統的狀態變數通過比例環節送到輸入端去的反饋方式。輸出反饋控制是採用輸出矢量Y構成線性反饋律。
狀態反饋控制的優點是,不改變系統的能控性,可以獲得更好的系統性能。其缺點是,不能保證系統的能觀性,狀態x必須可測,成本高。
輸出反饋控制的優點是:保持系統的能控性和能觀性不變,結構簡單,只用到外部可測信號。其缺點是,由於用到的信號少,它所達到的系統性能往往有限,有時甚至都不能達到閉環系統的穩定性。
模糊輸出反饋控制
利用模糊T-S模型對不確定非線性系統進行描述和建模,進而實現系統控制的設計,已成為模糊控制領域中的一個重要研究方向,並取得了一些理論成果 。先套用模糊T-S模型對一類不確定非線性時滯系統進行模糊建模,得到不確定時滯模糊系統,給出模糊狀態反饋控制和基於觀測器的動態輸出反饋控制的設計。
一般說,控制系統的狀態並不都是直接可測的,因此需要設計狀態觀測器,對狀態進行估計,然後設計模糊控制器,通過模糊控制器來證明不確定模糊時滯系統是漸近穩定的 。
