反饋控制的概念
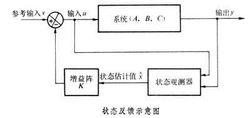
利用系統輸出信息或狀態信息反饋到系統的輸入,並與系統的參考輸入一起,組成一定的控制規律來控制系統的輸出回響,稱為反饋控制.反饋控制主要的特點是能改變系統的極點位置,從而改變系統的動態回響.例如。採用輸出反饋控制較開環控制可以提高系統抗擾動能力。可以降低系統對其內部參數變化的靈敏度;又如,採用輸出負反饋,可以使原開環系統不穩定變為穩定,可以使對象慣性較大系統變得系統慣性較小,從而加快系統動態回響。全狀態反饋控制可以作到使閉環系統極點為希望的極點.從而可以完全確定系統的回響性能,得到希望的動態回響特性,當然。實現系統的全狀態反饋必須滿足系統是完全能觀測的和系統是完全能控的,實際系統要想獲得狀態的全部信息,大多數情況是比較困難的,因此。工程上採取比較簡單辦法實現反饋控制。一種辦法是只採用輸出信息反饋控制,另一種辦法是間接實現全狀態反饋控制,即套用狀態觀測器的狀態反饋控制,也可以獲得優良的控制性能。
原理
當受控客體受干擾的影響,其實現狀態與期望狀態出現偏差時,控制主體將根據這種偏差發出新的指令,以糾正偏差,抵消干擾的作用。在閉環控制中,由於控制主體能根據反饋信息發現和糾正受控客體運行的偏差,所以有較強的抗干擾能力,能進行有效的控制,從而保證預定目標的實現。管理中所實行的控制大多是閉環控制,所用的控制原理主要是反饋原理。這種控制如果我們把輸入值用x表示,輸出值用y表示,客體的功能用s表示,控制系統也即反饋系統的作用用R表示,偏差信息用△x表示,
則有:y=S(X+△X)=S(X+Ry)=SX+SRy
式中R稱反饋因子或控制參數,它反映閉環控制系統的反饋功能或控制功能。
在閉環控制系統里,即使有干擾,也能通過自己的調節保持原來的狀態。實施閉環控制的抗干擾能力來自於反饋作用。因為在組織形式上增設了一個反饋機構,能把造成偏離目標的原因以及一貫干擾的因素及時地反饋給控制者,使決策控制層作出正確的決策,隨時修正目標。
閉環控制的優點是充分發揮了反饋的重要作用,排除了難以預料或不確定的因素,使校正行動更準確,更有力。但它缺乏開環控制的那種預防性。如在控制過程中造成不利的後果才採取糾正措施。
狀態反饋
狀態反饋是系統的狀態變數通過比例環節傳送到輸入端去的反饋方式。狀態反饋是體現現代控制理論特色的一種控制方式。狀態變數能夠全面地反映系統的內部特性,因此狀態反饋比傳統的輸出反饋能更有效地改善系統的性能。但是狀態變數往往不能從系統外部直接測量得到,這就使得狀態反饋的技術實現往往比輸出反饋複雜。
狀態反饋是控制系統設計中的一種基本控制方式。給定線性定常系統Σ(A,B,C),稱
 全狀態反饋控制
全狀態反饋控制為Σ的狀態反饋,其中K∈Rr×n,F∈Rr×r,且detF≠0。將上式代入原系統得閉環系統ΣC(A+BK,BF,C)。ΣC表明狀態反饋改變了原系統Σ的結構,因此也就改變了原系統的動態行為。狀態反饋不能改變原系統Σ的能控性,但能改變原系統Σ的能觀測性。
對系統Σ(A,B,C),量測的通常不是全部狀態x而是輸出y。此時為實現狀態反饋必須增加狀態觀測器。為了直接套用量測信息,取u=Hy+Fv,其中H∈Rr×m,F同上,通常稱為輸出反饋。輸出反饋既不改變原系統Σ的能控性,又不改變原系統Σ的能觀測性。
 全狀態反饋控制
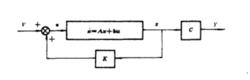
全狀態反饋控制圖中為狀態反饋的基本形式。其中是狀態變數的估計值,K是一個常係數矩陣(比例環節),通常稱為反饋增益矩陣。如果原系統是定常線性系統(A,B,C),則在引入狀態反饋K以後,系統就化成(A-BK,B,C)。狀態反饋把系統的動態矩陣A變成A-BK,但不影響輸入矩陣B和輸出矩陣C。狀態反饋也不影響系統的能控性,但可能改變系統的能觀測性。只要原系統是能控的,則一定可以通過適當選取反饋增益矩陣K用狀態反饋來任意移置閉環系統的極點(見極點配置)。對於傳統的輸出反饋,如果不引入附加的補償裝置,這一點不是總能作到的。
隨著狀態觀測器理論和狀態估計方法的發展(特別是由於卡爾曼-布希濾波方法的出現),在很多情況下已不難獲得狀態變數的良好實時估計值,狀態反饋方法已進入了實用階段。
全狀態反饋控制概念
全狀態反饋控制的主要特點是能任意配置系統極點位置,從而改善動態回響。設一個給定的n階系統,其傳遞函式的n個極點的位置,能通過n個狀態反饋而任意改變,那么就可以控制系統的動態回響,達到人們所希望的任意特性。但是如若實現全狀態反饋。則首先要求系統的刀個狀態量能夠直接測量,其次.要求系統是完全能控的,上述兩個條件若能滿足,就可以任意地配置系統的極點。
設單輸入、單輸出線性定常系統的狀態方程為
 全狀態反饋控制
全狀態反饋控制綜上,根據系統要求,給定希望的閉環極點配置.就可以決定閉環系統特徵多項式,從而決定全狀態反饋的反饋增益矩陣足。
狀態反饋閉環系統框圖。如圖所示。
 全狀態反饋控制
全狀態反饋控制要實現全狀態反饋就需要測出系統的全部狀態變數,這對某些實際系統往往是困難的,或者由於感測器部件昂貴而不便採用。解決的辦法是採用狀態觀測器間接地估計系統的狀態,或者是只採用簡單的輸出量反饋。採用輸出反饋儘管不能像全狀態反饋那樣可以任意配置反饋系統的極點,但只要適當地選擇控制器的結構和參數,也能局部地配置系統的零極點,使閉環系統獲得比較好的性能。下面將介紹狀態觀測器的概念。
狀態觀測器
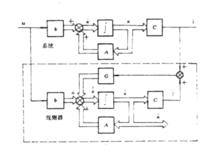
當需要設計一個性能指標要求很高的動態系統時,就只能考慮採用全狀態反饋控制。但一些實際系統的狀態變數有時不易直接測量。這時就用狀態觀測器來估計這些不能量測的狀態變數,以實現希望的全狀態反饋控制。
假定被控對象是一個線性定常單變數系統,且它是完全能控與完全能觀測的,系統的狀態方程和輸出方程為
全狀態反饋控制現要求依照系統的輸入和輸出設計一個觀測器,如圖所示,從圖可見,觀測器的輸入是u,Y,而其輸出是x^,要求當f→∞時觀測器的輸出童漸近地趨於x,
 全狀態反饋控制
全狀態反饋控制特點
在給出性能準則意義上的最優解在於,把調節對象的全部狀態並聯同最優求得的增益一起反饋到這個對象的所有可能的輸入端。
這種完美的解析解法,在二次型性能準則和調節對象的線性(或線性化)微分方程情況下,不僅能提供最優調節系統普遍有效的結構及與其相關的專門與給出任務相匹配的反饋增益值,而且還能確保總系統的穩定性。由上面所列的假設(二次型性能準則,線性調節對象)還能確保只存在一個唯一的極小值,即從空間直觀地把取決於調節參數的性能函式的“等高線刀想像為多維旋轉橢球體。
除了這些給人以深刻印象的優點之外,該方法還存在一系列的有些還很嚴重的缺點:
•只有線性系統的解才能以這類方法計算;如從4.3節中得到的現有的牽引系統是高度非線性的,在複雜高階系統中進行數值計算是很困難的。
•系統所有狀態必須是可測量的或可觀測的,這點在這裡也同樣辦不到,或者需要較大的費用,即技術上感興趣的準最最佳化系統也不能進行計算,在這種準最最佳化系統中不是將全部狀態都反饋到全部控制量上。
•一般情況下給定大量的反饋元素,目前在具有12個狀態和8個輸入的(4個電動機,既可以調節推力幅度,也可以調節推力方向)情況,得到12×8=96個反饋元素,這意味著設備技術的巨大耗費。
•用所提到的方法不能馬上考慮關於伺服量或狀態量的可能約束,而且所給定的伺服電機的最大推力幅度常常僅為1000N。
狀態反饋對系統能觀測性的影響
狀態反饋對系統能觀測性的影響是指系統引入狀態反饋之後系統的能觀測性是否發生變化。例如,原系統是能觀測的,在引入狀態反饋之後,改變原來系統的能觀測性,同時也有可能出現相反的情況,即引入狀態反饋之後,原來不能觀測的系統變成能觀測的系統。
一般來說,當用狀態反饋配置的系統極點與原系統的零點相同,即出現零點、極點相消時,狀態反饋就改變了原來系統的能觀測性。
狀態反饋和輸出反饋的聯繫
控制理論最基本的任務是,對給定的被控系統設計能滿足所期望的性能指標的閉環控制系統,即尋找反饋控制律。狀態反饋和輸出反饋是控制系統設計中兩種主要的反饋策略,其意義分別為將觀測到的狀態和輸出取作反饋量以構成反饋律,實現對系統的閉環控制,以達到期望的對系統的性能指標要求。在經典控制理論中,一般只考慮由系統的輸出變數來構成反饋律,即輸出反饋。在現代控制理論的狀態空間分析方法中,多考慮採用狀態變數來構成反饋律,即狀態反饋。
之所以採用狀態變數來構成反饋律,是因為狀態空間分析中所採用的模型為狀態空間模型,其狀態變數可完全描述系統內部動態特性。由於由狀態變數所得到的關於系統動靜態的信息比輸出變數提供的信息更豐富、更全面,因此,若用狀態來構成反饋控制律,與用輸出反饋構成的反饋控制律相比,則設計反饋律有更大的可選擇的範圍,而閉環系統能達到更佳的性能。另一方面,從狀態空間模型輸出方程可以看出,輸出反饋可視為狀態反饋的一個特例。因此,採用狀態反饋應能達到更高的性能指標。
控制擴展
開環控制沒有反饋環節,系統的穩定性不高,回響時間相對來說很長,精確度不高,使用於對系統穩定性精確度要求不高的簡單的系統,開環控制是指控制裝置與被控對象之間只有按順序工作,沒有反向聯繫的控制過程,按這種方式組成的系統稱為開環控制系統,其特點是系統的輸出量不會對系統的控制作用發生影響,沒有自動修正或補償的能力。
閉環控制有反饋環節,通過反饋系統使系統的精確度提高,回響時間縮短,適合於對系統的回響時間,穩定性要求高的系統。
半閉環控制系統是在開環控制系統的伺服機構中裝有角位移檢測裝置,通過檢測伺服機構的滾珠絲槓轉角間接檢測移動部件的位移,然後反饋到數控裝置的比較器中,與輸入原指令位移值進行比較,用比較後的差值進行控制,使移動部件補充位移,直到差值消除為止的控制系統。這種伺服機構所能達到的精度、速度和動態特性優於開環伺服機構,為大多數中小型數控工具機所採用。
