
簡介
控制系統最基本的結構形式是由受控系統和實現反饋控制規律的反饋環節所構成的反饋控制制系統。在古典控制理論中,反饋信號一般取自輸出信號,反饋形式為輸出反饋,而在現代控制理論中,基本反饋形式就是狀態反饋。狀態反饋是將系統的何一個狀態按照一定的比例反饋到輸入端,與系統的參考輸入進行綜合形成控制律,作為受控系統的控制輸入。
狀態反饋控制是現代控制理論的一種特色。 一個系統的狀態變數可以展現其整個系統的內部特性而不需要知道系統的內部結構。 所以相對於傳統的輸出反饋控制, 狀態反饋控制能夠更優秀更有效的控制系統, 使其穩定正常工作。 然而由於狀態變數是不能直接由系統外部直接測量得到的, 這讓狀態反饋技術在實現的過程中相對於輸出反饋複雜。狀態反饋變數不會影響原系統的能控性, 但是可能會改變系統的能觀性只要原系統是能控的, 則一定能夠通過選著適當的反饋增益矩陣 K 用狀態反饋來任意移植閉環系統的極點。這一點傳統的輸出反饋控制是不能做到的。
原理
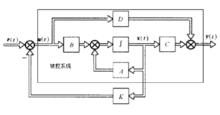 圖1 狀態反饋控制結構圖
圖1 狀態反饋控制結構圖狀態反饋控制的定義為:將系統的每一狀態變數乘以相應的反饋係數, 反饋到輸入端, 與參考輸入相加,其和作為被控系統的控制信號。
狀態反饋控制系統的基本結構如圖1所示,其中虛線框內是被控系統,矩陣K為反饋矩陣,反饋矩陣K起主要作用。
設系統的狀態空間表達式為:
 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制設狀態反饋矩陣 為該系統的狀態反饋增益矩陣,在一般情況下,控制規律是參考輸入向量r(t)及狀態向量x(t)的非線性函式,即:u(t)=f(r(t),x(t))。對於線性定常系統,可以把控制向量u(t)視為向量r(t)及x(t)的線性函式,即:u(t)=r(t)-Kx(t)。將上式代入被控控系統的狀態方程:dX(t)/dt=(A-BK)X(t)-Br(t),從而狀態反饋系統的傳遞函式矩陣為:
 狀態反饋控制
狀態反饋控制系統在未實行狀態反饋時的傳遞函式知陣為:
 狀態反饋控制
狀態反饋控制可見,狀態反饋矩陣K的引入,沒有增加系統的維數。可以得到閉環系統矩陣為 ( A-BK),再由系統特徵多項式可以看出,再加入|λI-(A-BK)|可以看出,再加入狀態反饋矩陣以後,系統矩陣和特徵值有所改變,但是其 A、B 值均無變化。因此,可以通過矩陣K的選擇來改變系統的特徵值(即改變系統的極點),從而可使系統獲得期望的性能。
主要特性
系統的可控性和可觀性是Kalman在1960年首先提出來的,它是狀態反饋控制、最優控制和最優控制的基礎。狀態空間表達式揭示了系統內部運動的狀態里與外部輸入輸出量之間的關係。
可控性
 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制定理:多變數線性系統(定常的或時變的) ,在任何形如u(t)=r(t)+K(t)x(t)的狀態反饋下,這個狀態反饋閉環系統 完全可控的充要條件是被控對象 完全可控。
該定理對於多變數時變系統也是合適的。
可觀性
雖然狀態反饋保持了動態方程的可控性,但總可以選擇某一狀態反饋陣 K,破壞動態方程的可觀性。狀態反饋不改變系統的可控性, 但可能改變系統的可觀性。一般地說, 當用狀態反饋配置的系統極點與原系統相同時, 即出現零、 極點對消時,狀態反饋就改變了系統的可觀性。
定理:輸出反饋閉環系統可控的充要條件是被控系統可控; 輸出反饋閉環系統可觀的充要條件是被控系統可觀。
極點配置
極點配置定理:線性(連續或離散)多變數系統 {A,B,C} 能任意配置極點的充分必要條件是,該系統狀態完全可控。
1) 期望閉環極點組的性能指標屬性:期望閉環極點組具有二重性, 理論計算上的閉環期望極點組和控制工程中的直觀性能指標。
 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制2) 控制工程中基本類型的性能指標:時間域: 、 、 、 、 、 、ζ;頻率域: 、 、 ;它們間可以相互轉化,如:
 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制 狀態反饋控制
狀態反饋控制3) 基本類型性能指標和期望閉環極點組的主導極點對的關係:
 狀態反饋控制
狀態反饋控制4) 期望閉環極點組的確定主導極點:
主導極點為:
狀態反饋控制