背景
分散控制是近年來控制理論與套用中出現的一個新分枝。通過不斷地提出新的概念,解決新的問題,以及把所得的理論套用到工程實際中,使得分散控制在理論上更加完善,套用上更加廣泛深人,因此也越來越受到重視。
Wang和Davison (1973年)首先提出了分散固定模的概念,得到:線性定常分散控制系統可以用定常分散動態控制器鎮定的充要條件是分散固定模穩定,它深刻地刻劃了這類系統的本質Esc, Corfmat和Morse (1976年)給出了一種設計定常分散動態控制器的方法:當分散控制系統僅具穩定的分散固定模且是強關聯時,則存在分散輸出反饋,使得反饋後的系統對某一個通道是可鎮定和可檢測的,從而可以利用定常集中控制系統的標準方法設計動態控制器達到反饋系統穩定,進而得到定常分散動態控制器,Kobayashi, Hanafusa和Yoshikawa (1978年,1982年)提出了線性定常系統在分散信息結構下可控性的概念,得到:如果系統是可控、可觀和強關聯時,存在分散控制規律,使得在有限的時間內可將任意初始狀態控制到零狀態,它推廣了集中系統的可控性和可觀性的概念。
Anderson和Moore (1981年)對有不穩定分散固定模的定常分散控制系統進行了研究,得到:如果系統是可控、可觀和強關聯時,則存在周期時變分散反饋,使得反饋後的系統對某一個通道是一致完全可控和一致完全可觀的,從而可以利用周期時變集中控制系統的標準方法設計周期時變動態控制器達到反饋系統位置穩定度,進而得到周期時變分散動態控制器的設計。以上的研究奠定了線性定常分散控制理論的基礎。對於線性時變分散控制系統,到目前為止,還沒有人進行過研究.我們知道,線性時變系統與線性定常系統有著很大的區別。在時變系統中,特徵根對穩定性的判別已無意義,因而分散固定模的概念對時變分散控制系統已無意義。所以我們不能象研究定常分散控制系統那樣從分散固定模著手去研究時變系統。
分散控制
分散控制是指系統中的控制部分表現為若干個分散的,有一定相對獨立性的子控制機構,這些機構在各自的範圍內各司其責,各行其是,互不干涉,各自完成自己的目標。當然這些目標是整個系統目標中的分目標。
分散控制的特點是與集中控制相反,不同的信息流入不同的控制中心,不同的控制指令由不同的控制中心發出。
分散控制沒有統一的控制器,全部控制功能分散在各個子運算中完成,在此控制方式中,各子運算的輸出、輸入信號及系統信號相互關聯。分散控制的時序可以是同步的,也可以是異步的。
分散控制的優點是針對性強,信息傳遞效率高單,系統適應性強。缺點是信息不完整,整體協調困難。分散控制適應系統組織較鬆散的部門,如城市各交叉路口的交通管理、企業集團的一些外圍企業等。
魯棒分散控制
傳統集中式控制方法需同時採用系統所有測量信號,進而計算出所有作動器的控制力並發出信號進行振動控制,其控制系統複雜且可靠性較差。而基於系統局部信息反饋的分散控制策略,設計簡單可靠性高。由於分散控制採用系統局部信號反饋的控制方法,少數作動器的失效並不會致使整個系統的控制失敗,更適於實際套用。
但是分散控制策略的作動器控制力僅採用建築物的相鄰兩層測量信號進行控制,雖然能夠控制住結構的回響,但信息過少,控制效果不好。為達到更好的控制效果,在魯棒控制策略基礎上,通過設定特殊矩陣的方式,提出一種基於建築物相鄰四層信號的魯棒分散控制方法。從動力仿真的結果來看,該方法的控制效果比僅依靠相鄰二層信號的控制效果好得多。
對於建築結構在地震激勵下的振動控制,傳統魯棒集中控制策略的系統複雜且可靠性相對較低,當其中少數作動器的失效就可能導致整個控制系統控制失敗。因此,具有系統簡單可靠性高等優點的魯棒分散控制策略,在保證控制效果的情況下,可以一定程度上彌補魯棒集中控制策略的不足。
反饋控制
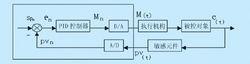
反饋控制 feedback control 是利用反饋信息進行的控制。生產系統的實際工作表現由感應系統或量度系統進行測定,然後同所要求的標準進行比較,如在差異,則由控制系統加以解釋,並由控制系統給操縱裝置下命令,操縱裝置則提供控制行動,以便改正工作表現,消除異差。這是最簡單的反饋制模式。
反饋控是指控制論的一個基本概念。指作為被控的輸出以一定方式返回到作為控制的輸入端,並對輸入端施加控制影響的一種控制關係。在控制論中,反饋通常指輸出端通過“旁鏈”方式回饋到輸入,所謂反饋控制。輸出端回饋到輸入端並參與對輸出端再控制,這才是反饋控制的目的,這種目的是通過反饋來實現的。
 分散反饋控制
分散反饋控制反饋控制是根據控制對象輸出反饋來進行校正的控制方式,它是在測量出實際與計畫發生偏差時,按定額或標準來進行糾正的。反饋控制,從輸出量變化取出控制信號作為比較量反饋給輸入端控制輸入量,一般這個取出量和輸入量相位相反,所以叫負反饋控制,自動控制通常是反饋控制。比如家用空調溫度的控制。
原理
當受控客體受干擾的影響,其實現狀態與期望狀態出現偏差時,控制主體將根據這種偏差發出新的指令,以糾正偏差,抵消干擾的作用。在反饋控制中,由於控制主體能根據反饋信息發現和糾正受控客體運行的偏差,所以有較強的抗干擾能力,能進行有效的控制,從而保證預定目標的實現。管理中所實行的控制大多是反饋控制,所用的控制原理主要是反饋原理。這種控制如果我們把輸入值用x表示,輸出值用y表示,客體的功能用s表示,控制系統也即反饋系統的作用用R表示,偏差信息用△x表示,
則有:y=S(X+△X)=S(X+Ry)=SX+SRy
式中R稱反饋因子或控制參數,它反映反饋控制系統的反饋功能或控制功能。
控制擴展
開環控制沒有反饋環節,系統的穩定性不高,回響時間相對來說很長,精確度不高,使用於對系統穩定性精確度要求不高的簡單的系統,開環控制是指控制裝置與被控對象之間只有按順序工作,沒有反向聯繫的控制過程,按這種方式組成的系統稱為開環控制系統,其特點是系統的輸出量不會對系統的控制作用發生影響,沒有自動修正或補償的能力。
反饋控制有反饋環節,通過反饋系統使系統的精確度提高,回響時間縮短,適合於對系統的回響時間,穩定性要求高的系統。
半反饋控制系統是在開環控制系統的伺服機構中裝有角位移檢測裝置,通過檢測伺服機構的滾珠絲槓轉角間接檢測移動部件的位移,然後反饋到數控裝置的比較器中,與輸入原指令位移值進行比較,用比較後的差值進行控制,使移動部件補充位移,直到差值消除為止的控制系統。這種伺服機構所能達到的精度、速度和動態特性優於開環伺服機構,為大多數中小型數控工具機所採用。
