
計畫協調技術
正文
套用網路模型制訂和控制一項工程(或任務)有關活動(如作業、工序等)的先後順序和工作進度的計畫管理技術,又稱計畫評審技術,英文簡稱PERT。原來在計畫管理中套用的甘特圖(線條圖)不能適應技術複雜、投資費用大、研製周期長和協作單位多的武器系統的研製計畫管理。美國海軍部遂於1958年創造出計畫協調技術,套用計算機進行計算而獲得成功。計畫協調技術不僅在工程技術方面得到廣泛套用,而且在社會、經濟等領域也有廣闊的套用前景。PERT 網路圖
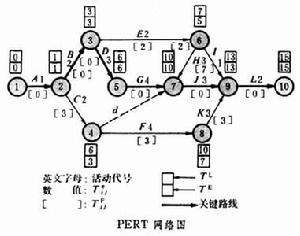 它是在分析工程(或任務)的所有活動相互關係的基礎上套用節點和有向邊構成的網路圖(見圖)。它的構成要素有活動、先行活動、後續活動、平行活動、虛擬活動等。①活動:是指需要消耗一定時間和資源的作業或工序,由節點和有向邊構成。如圖中A、B等均為活動,節點1表示A開始時刻,稱活動始點(或事件始點),節點2表示A結束時刻,稱活動終點(或事件終點)。②先行活動和後續活動:圖中A的活動終點是B的活動始點,稱A是B的先行活動;反之,稱B是A的後續活動。③平行活動:B、C兩活動均為A的後續活動,則B、C稱為平行活動。④虛擬活動:圖中若活動J的先行活動必須是C、H、G,為了正確描述其邏輯關係,則可在C後加一虛擬活動d與J相連。d不需要消耗時間或資源。
它是在分析工程(或任務)的所有活動相互關係的基礎上套用節點和有向邊構成的網路圖(見圖)。它的構成要素有活動、先行活動、後續活動、平行活動、虛擬活動等。①活動:是指需要消耗一定時間和資源的作業或工序,由節點和有向邊構成。如圖中A、B等均為活動,節點1表示A開始時刻,稱活動始點(或事件始點),節點2表示A結束時刻,稱活動終點(或事件終點)。②先行活動和後續活動:圖中A的活動終點是B的活動始點,稱A是B的先行活動;反之,稱B是A的後續活動。③平行活動:B、C兩活動均為A的後續活動,則B、C稱為平行活動。④虛擬活動:圖中若活動J的先行活動必須是C、H、G,為了正確描述其邏輯關係,則可在C後加一虛擬活動d與J相連。d不需要消耗時間或資源。 活動所需時間計算 一般用三點估計法計算,即把活動所需時間估計成樂觀值(a)、悲觀值(b)、最可能值(m)等三種時間值,用機率求和的方法進行計算,得出活動所需的期望時間
 及表示其分散程度的偏差值σij 。其計算公式為
及表示其分散程度的偏差值σij 。其計算公式為 。最後將計算所得記在相應的活動旁。例如,對於活動A,其a1 2=0.8,b1 2=1.2,m1 2=1.0,則T嗊=(0.8+4×1+1.2)/6=1.0,σ剦=【(b1 2-a1 2)/6】2=0.0045。
。最後將計算所得記在相應的活動旁。例如,對於活動A,其a1 2=0.8,b1 2=1.2,m1 2=1.0,則T嗊=(0.8+4×1+1.2)/6=1.0,σ剦=【(b1 2-a1 2)/6】2=0.0045。 節點時刻計算 ①節點j的最早開始時刻T媓,是指由節點 j為始點的活動最早能夠開始的時刻。按下式計算,即
 =0(1為網路圖的第一個節點);
=0(1為網路圖的第一個節點); 例如,圖中節點7的最早開始時刻
例如,圖中節點7的最早開始時刻 
 。②節點i的最遲完成時刻T忦, 是指由節點i為終點的活動最遲必須在何時完成才不致影響後續活動正常進行的時刻。其計算公式為
。②節點i的最遲完成時刻T忦, 是指由節點i為終點的活動最遲必須在何時完成才不致影響後續活動正常進行的時刻。其計算公式為  (n為網路圖的最後一個節點);
(n為網路圖的最後一個節點); 。例如,節點6的最遲完成時刻
。例如,節點6的最遲完成時刻
 。
。 活動寬裕時間計算 在允許時期內完成活動後尚有寬裕的時間,記作
 按
按 計算。如活動E 的寬裕時間
計算。如活動E 的寬裕時間
關鍵路線 將所有寬裕時間為零的活動用粗線邊連線起來即構成關鍵路線,圖中的粗線表示關鍵路線。關鍵路線上的任一活動的提早或延遲完成,均能使整個計畫周期縮短或延長,因此是今後管理和控制的重點。
PERT實施 通過已經建立的網路模型和相應的計算結果,即可對計畫執行過程進行控制和協調,並評價各項活動的提早或延遲完成對整個計畫的影響程度。據此採取相應措施以調整計畫進度。當客觀條件發生變化,需要重新修改計畫時,只需要進行局部調整,使因條件變化而造成的損失為最小。套用計畫協調技術制訂計畫還可以同時制訂若干備選方案,以便比較,從中找出最優方案付諸實施。
PERT的發展 60年代以來,在計畫協調技術的基礎上已先後研究出許多新的計畫管理網路技術。例如,60年代末美國蘭德公司所創造的圖解協調技術(GERT),以及後來出現的排隊圖解協調技術(Q-GERT)、風險協調技術(VERT)等。
參考書目
S.E.Elmaghraby, Activity Networks, John Wiley & Sons, New York,1977.
