
功能介紹
尋的制導最基本的特徵是目標的探測與跟蹤在飛彈上完成.用來探測和跟蹤目標的設備安裝在飛彈頭部,稱為導引頭。導引頭基本功能是截獲目標.跟蹤目標.連續測量目標的位置信息、運動信息,並且按照規定的導引規律輸出控制信號。
(1)目標截獲
導引頭正常截獲目標的基本條件是搜尋空域滿足一定落入機率,必須設定合理判定目標的門限,使背景噪聲和內部噪聲造成的虛警機率足夠小,同時使具有一定信噪比的目標回波信號檢測機率足夠大。由於目標不同,初始條件不同,導引頭截獲跟蹤目標的過程以及戰術使用特點的不同,採用的截獲方式也必然是多種多樣的,經常提到的”發射前鎖定”、“發射後鎖定”、“人工鎖定”、“自動鎖定”、“打了不管”等.反映了導引頭不同的截獲方式。“發射前鎖定”是指飛彈起飛前,導引頭已經捕獲和跟蹤目標.飛彈起飛後可以立即轉入尋的制導受控飛行。發射前對目標鎖定往往是通過其他探測設備提供目標信息,對導引頭的指向、距離測量系統和速度測量系統的初態進行引導與裝定。“發射後鎖定”是指飛彈起飛後.導引頭在飛行中搜尋和截獲目標。有的系統通過地面或其他平台為導引頭提供目標粗信息,使導引頭減小在空域、時域及頻域的搜尋範圍,甚至在某一維上可不搜尋.處於“等待”狀態.這塒縮短截獲時間,提高截獲機率是有利的。另一種情況是沒有任何導引信息。導引頭獨立完成對目標的搜尋和截獲。此時搜尋範圍要擴大,截獲時間要增加,截獲目標難度大.特別是在複雜的戰場環境中.自主截獲目標更困難。這就要求導引頭能提取日標特徵.建立有效的判據。這種發射後不需要地面或其他平台配合,獨立自主截獲目標的能力。習慣上又被稱為“打了不管”。實際套用中.很多系統是人進行初始判定決策.完成目標截獲.稱為“人工鎖定”。
(2)目標跟蹤
導引頭截獲目標之後,轉入跟蹤。跟蹤目標的基礎是連續測量目標,包括目標角度、距離和速度的測量,根據當前測量視窗(包括空間視窗、時間視窗、頻率視窗)位置和相應的誤差.實時調整視窗位置對準日標。完成對目標的跟蹤。在尋的制導中.導引頭角跟蹤系統提供目標視線在測量坐標系中與參考軸的夾角.提供在慣性空間視線轉率信息,形成控制指令。距離跟蹤、速度跟蹤不是所有導引頭都具備的,一般來講,從制導律j二看,不直接影響控制指令的形成,但是距離、速度跟蹤對於目標分辨、背景雜波抑制以及改善尋的制導精度是非常重要的。
組成
尋的系統的基本組成。概括起來有以下部分。
(1)能量發射裝置
對於探測和跟蹤目標散射信號的尋的系統來說.需要傳送能量照射目標.包含了目標信息的部分散射能量被導引頭接收.實現目標的探測和跟蹤.能量發射裝置可以放在彈上.屬於導引頭一個組成部分,也可以放在地面或其他平台上。有的尋的系統探測跟蹤目標與背景的輻射信號。則不需要能量發射裝置。
(2)能量收集裝置
為接收足夠的目標散射或輻射能量,需要一定口徑.一定面積的收集器,即雷達導引頭中的天線,或紅外光學導引頭中的鏡頭。這種天線或鏡頭具有明顯的方向性,這是導引頭測角的基礎。
(3)掃描裝置
能量收集器方向性強.對天線來說波束寬度窄,對光學鏡頭來說是指瞬時視場很小。很多系統是利用波束或視場運動,完成順序比較測角或者掃描成像,掃描裝置的功能是使波束或視場按一定規律高速運動。對於瞬時比較測角或者凝視成像系統。則不需要掃描裝置。
(4)信號檢測裝置
導引頭收集到目標散射或輻射能量,通過檢測裝置轉成基帶信號,是反映目標信息最原始的信號。雷達導引頭中混頻、檢波電路等,光學導引頭中光電轉換的探測器件都屬檢測裝置。
(5)信號處理裝置
信號處理主要完成目標識別、判決、參數提取。需要對原始的信號進行積累、濾波以及變換。信號處理主要通過計一算機完成。
(6)伺服機構
尋的制導過程中.導引頭天線指向是通過伺服機構調整的。目標偏離天線軸線時,產生角誤差信號,經放大和校正處理送至力矩器,使天線指向對準目標。
(7)穩定平台
導引頭是以彈上測量坐標為參考測量目標坐標和運動狀態。飛彈飛行過程中彈體姿態會出現很大的擺動.如果彈體運動耦合到測量坐標系.就會造成不利影響.使導引頭角跟蹤迴路工作更困難,不僅要跟蹤目標的運動,同時還要克服由於彈體擺動造成的附加運動。這樣,導引頭輸出的目標運動狀態不再是在慣性空間的運動。而是疊加了彈體擺動。這會破壞正常的導引規律。因此測量坐標系和彈體之間的去耦是非常重要的。去耦可以通過穩定迴路實現,也可以使用慣性元件直接穩定天線或光學鏡頭指向.例如把導引頭天線或主鏡與三自由度陀螺內環固聯,利用陀螺定軸性實現去耦。穩定平台不僅可以使用硬體方法實現,也可以通過軟體完成.或行稱為去耦數學平台。這種去耦方法是用於導引頭天線或主鏡與彈體直接固聯,沒有常平架伺服的系統.角跟蹤是通過調整彈體姿態實現。導引頭輸出的目標信息中疊加了彈體姿態擺動信息,根據彈上姿態運動感測器的輸出,經過處理可以消除彈體擾動影響,恢複目標本身的信息。採用這種去耦方式的前提是彈體姿態擺動幅度不應超出導引頭視場。
(8)頭罩
除上述組成部分外,還有一個特殊部件,就是導引頭頭罩。頭罩位於飛彈的頭部.屬於彈導一個艙段,其形狀由飛彈總體氣動外形確定。由於飛彈飛行中頭罩受到各種力作用和氣動加熱.閃此頭罩必須有足夠的強度和耐燒蝕性。同時頭罩和導引頭又有密切關係,在導引頭工作的頻譜範圍內.頭罩必須具有良好的透過性,折射誤差以及誤差變化率要足夠小。因此頭罩要滿足兩方面的要求。實際套用中。由於折射誤差及變化率的存在.因此頭罩是導引頭測量坐標與彈體坐標之間的耦合環節,對角跟蹤迴路也會帶來很大影響。
特點
尋的制導與指令制導相比,在系統組成和戰術性能方面存在許多特殊性,其基本特點可以歸納為幾個方面。
(1)彈上制導探測設備
制導探測設備在彈上,探測設備和受控對象在一起.這是尋的制導一個突出的特點。這把探測、飛彈、目標三點制導轉化成飛彈、目標二點制導,使探測坐標和彈體坐標以及執行坐標保持嚴格的相關性,省去了三點制導中控制指令由探測坐標到彈上執行坐標的傳送和複雜轉換,避免了指令傳輸過程的傳送接收和調製解凋。使設備簡化,並可以減小或避免指令傳輸中引入的干擾。
(2)高制導精度
制導精度與探測精度有關,在指令制導中,探測系統要測量飛彈和目標之間角誤差.並根據飛彈到目標視線的線偏差形成控制指令.修正飛彈飛行。控制精度與目標測量精度、飛彈測量精度有關。飛彈越飛越遠.因此同樣測角誤差.當距離增大時.最終線偏差的測量誤差較大 尋的制導不存在飛彈測量的問題.只是測量目標,而且飛彈離目標越來越近,線偏差測量精度越來越高。從這個意義上說.尋的制導測量誤差是收斂的。另一方面尋的制導過程中,信噪比小斷提高.這對目標測量精度也是有利的。
(3)自主性強
尋的制導系統是在彈上探測目標,而後形成控制指令.直接送到執行機構.完成飛彈制導。原則上可以脫離地面支援。
(4)近場大目標效應
遠距離探測,可把目標看成一個點,當飛彈飛近目標時,從彈上探測目標.目標所占盤體角增大.不再是點目標,來自目標不同部位的信號可能產生干涉效應,使探測的目標等效散射中心發生移動。由於目標相對導引頭的姿態不斷變化造成目標散射中心在角度上快速抖動.即產生目標角噪聲.影響尋的制導的精度.這是尋的制導中的一個重要問題。近場大目標效應的另一個影響是當目標充滿視場後.使角誤差提取困難.尤其是非成像系統,將不能提供角信息.從而形成探測系統所決定的失控距離。
(5)探測坐標系與彈體運動擾動
探測坐標系會受到彈體運動擾動.這是尋的制導的特殊問題.導引頭必須有去耦措施。
(6)探測系統與環境約束
探測系統受彈上環境約束.尋的系統對探測設備的體積、重量有嚴格的要求。設備需經受振動、衝擊以及高低溫環境.因此導引頭的設計中.除了性能指標外,可靠性要求是十分重要的。通常導引頭工作時間較短.在設計中可以採用“暫態設計”原則.即保證在導引頭要求的工作時間內系統可靠。
分類
被動尋的制導
 尋的制導系統
尋的制導系統被動尋的制導時飛彈不主動發射信號,而是通過被動地接收目標輻射的電磁波、紅外線或可見光,引導飛彈飛行目標,如圖4 - 57所示為被動尋的制導示意圖。被動尋的制導根據輻射信息的不同可分為被動雷達尋的制導、被動紅外尋的制導和可見光尋的制導三大類。
被動雷達尋的制導是在飛彈頭部安裝雷達天線,依靠目標輻射的雷達信號來跟蹤目標,一般用於攻擊電磁輻射大的目標,如地面雷達站、預警機等,但如果對方採取一定反制手段,如敵方雷達關機,命中率就會受到很大影響,因此單獨使用效果差,需結合其他制導方式。
被動紅外尋的制導多用於中程空對空飛彈的末制導、近距格鬥空對空飛彈和反坦克飛彈等。它是利用飛彈上的探測設備,探測被跟蹤物體自身的紅外輻射來判斷和追蹤目標。發展較早的紅外製導只是利用目標的紅外輻射強度,把目標作為點光源處理,稱為紅外非成像制導。將紅外信號在空間上強度分布和頻率分布等進行分析處理,進而識別和跟蹤目標的制導方式稱為紅外成像制導。紅外製導飛彈隱蔽性好,精度高,在夜間視線不好的情況下使用效果也很好,但紅外製導距離受天氣影響較大。
可見光尋的制導又稱電視制導,可通過飛彈上的高清CCD攝像機尋找目標,並利用目標反射的可見光信息進行跟蹤和控制飛彈飛行。它有較高的解析度和制導精度,抗電磁波干擾能力強,但只能在白天和能見度較好的條件下使用,在夜間和惡劣天氣下不能使用,射程也較近。
主動尋的制導
 尋的制導系統
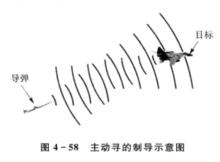
尋的制導系統主動雷達尋的制導的飛彈自帶雷達和天線,飛彈持續向目標發射雷達波並接受目標反射的雷達波,從而測定目標的方位、距離、軌跡等信息,修正飛彈飛行路線直至命中目標。該制導方式的優點是精度高,可全天候工作,抗干擾能力強。由於飛彈本身安裝了雷達,不依賴於載機雷達跟蹤目標,具備獨立搜尋、跟蹤目標的能力,因此對載機限制少、具有發射後不管的能力,可有效提高載機的生存率。缺點是飛彈裝載的雷達尺寸較小、功率較低,因此制導距離有限,一般用於飛彈的末段制導。
半主動尋制導
 尋的制導系統
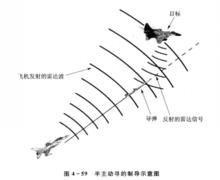
尋的制導系統半主動尋的制導用機載或地面雷達(或雷射照射器)持續跟蹤並照射目標,飛彈上的接收機接收目標反射的雷達波(或雷射),飛彈上的計算機運算得到目標的位置和運動參數,引導飛彈飛向目標。半主動尋的制導主要有兩種:半主動雷達尋的制導和半主動雷射尋的制導。
半主動雷達尋的制導主要用於對空飛彈,與主動雷達尋的制導相比,由於發射平台(飛機、艦船、防空陣地)裝載的雷達功率更高,因此制導距離更遠。其缺點是飛機發射飛彈後載機不能做大的機動,要用雷達一直跟蹤目標直至命中目標,不具備“發射後不管”的能力,因此降低了載機在空戰中的生存率。
半主動雷射尋的制導主要用於反坦克飛彈和近程對地攻擊飛彈,飛機或地面人員用雷射照射器照射目標,飛彈接收反射的雷射信號進行制導。半主動雷射尋的制導的制導精度很高,夜間也可以使用,但發射後也需要持續照射目標,不具備“發射後不管”的能力。
TVM制導
 尋的制導系統
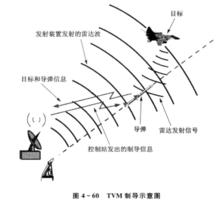
尋的制導系統通過飛彈的制導(Track Via Missile,TVM)是介於指令制導和半主動雷達制導之間的一種制導方式,如圖4 - 60所示。火控雷達照射目標導致回波反射,飛彈接收到反射的回波後,把接收到的回波信號發給地面(或軍艦)上的控制站,由控制站解算制導軌跡,並用無線電傳送回去,引導飛彈攔截目標。該制導類型的優點是飛彈不向目標發射雷達波,飛彈不需要進行複雜的計算,降低了成本和重量,而且飛彈的抗干擾性能好。缺點是不具備“發射後不管”的能力,一旦數據鏈被干擾中斷則會導致制導失敗。
引導法
飛彈在接近目標的過程中,與目標保持一定的關係,稱為導引法。是形成制導指令、決定彈道特性的基本因素。尋的制導常用的導引法有:①直接瞄準法。飛彈在接近目標過程中,彈縱軸始終對準目標。彈道較彎曲,但實現簡單,適於攻擊低速或固定目標。②變彈體前置角法。不論目標向何方向運動,飛彈縱軸始終指向目標前置方向。對低速目標,彈道較平直,實現簡單。常用於反艦飛彈的航向制導。③等彈體前置角法。飛彈縱軸對目標視線保持固定夾角。實現更簡單,但彈道較彎曲,且與目標運動方向有關。常用於低空巡航反艦飛彈的俯仰制導。④比例導引法。飛彈速度矢量轉動角速度與目標視線轉動角速度保持一定的比例關係。不論目標怎樣運動,彈道都較平直,實現較簡單,適於打擊活動目標,廣泛套用於對空和反艦飛彈。為改善彈道特性和提高制導精度,還常進行飛彈加速度、接近速度和重力修正,先進的飛彈還套用現代控制理論解決最佳制導問題。
複合尋的制導
特點
未來戰爭中.從戰場發展勢態分析可以看出,戰爭將走向立體化、快速化、電子化和綜合化。未來戰爭將是作戰體系對作戰體系的戰爭。一體化作戰.將綜合動用偵察、光電干擾,並採用多層次、多種類、多廳位、多架次全方向的電子戰.光電隱身技術手段。因而對於飛彈尋的制導,面對這種複雜的戰場環境,必須採取相應的技術手段,而其中複合尋的制導技術.將是行之有效的一種對策。
所謂複合的制導.就是在一個尋的器上安裝兩個和兩個以上的接受感測器。用得到的目標信息進行擬合處理加工。以期得到對目標準確的識別和判斷。用以對付目標的偽裝.隱身和所施放的各種光電干擾,並能在各種複雜的作戰環境下.全天候、全天時有效工作。
在設計複合尋的制導系統時應重點考慮以下原則:
(1)具有強的戰場適應性:能在能見度差、陰、雨、雪、霧等氣象條件下工作。
(2)具有良好的反隱身能力。即在目標微波隱身和光學隱身情況下能正常完成作戰任務。
(3)具有良好的抗光電干擾能力。
(4)能適應複雜的目標環境。即對於目標種類多.數量大.目標形體大或小,速度快與慢及真假目標等有快速截獲能力。
(5)有良好的目標選擇跟蹤及威脅判斷能力。
