
概述
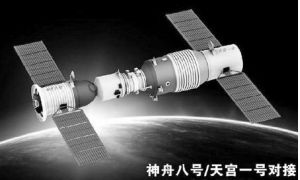 天神組合體
天神組合體組合分離
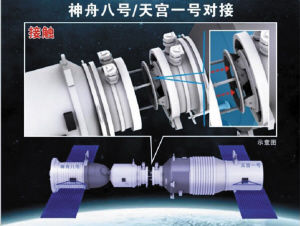
“神舟八號”與“天宮一號”成功交會對接以後,兩個太空飛行器組合體的連線主要依靠對接面上12把對接鎖,每把對接鎖的拉力3噸,共36噸,這12把對接鎖由兩組對接鎖系電機驅動。當神舟八號與天宮一號組合體的對接機構控制器接到分離指令後,對接鎖系就將執行分離指令,實施解鎖動作,時間需要3-4分鐘;對接鎖解開後,將通過對接面上4個被壓縮的彈簧推桿的彈簧力,將兩個8噸多重的太空飛行器輕輕推開。這個彈簧力並不大,只有幾百牛頓,相當於幾十公斤。兩個太空飛行器被推開後,將保持一定姿態,緩緩分離,直至準備執行第二次交會對接任務。
在浩瀚無垠太空讓兩個交會對接的太空飛行器組合體成功分離,是保證太空人安全返回地球的前提。上海航天技術研究院在對接結構設計中,採取了多種“冗餘”措施以確保太空飛行器組合體分離,如果自動分離不成功,還可以採取手動分離或火工品分離。
倒飛姿態
 “天神”第一次交會對接示意圖
“天神”第一次交會對接示意圖由於目前天宮神八組合體運行以天宮一號控制為主,神舟八號處於停靠狀態,組合體的姿態調整由天宮一號來控制進行。因此這次太空轉身,天宮神八組合體沒有啟動軌控發動機,而是依靠陀螺動量輪的控制完成,目的是儘可能減少對軌道的擾動。
交會對接
第二次對接將在陽照區進行,對在光照條件下的交會對接來說,依然充滿著風險和挑戰,主要體現在三個方面: 天神組合體
天神組合體1、第二次交會對接在陽照區進行,由於雜光干擾強烈,對測量設備敏感器的測量精度和相對導航的可靠性均造成較大的影響,對交會對接的可靠實施帶來了一定的風險。
2、由於組合體第一次實施分離控制時,有一系列的機械動作,組合體能否按計畫精確地完成分離,是完成二次對接的關鍵所在。在這個環節,我們制定了一系列的應急預案和措施,保證在異常情況下也能有效分離。
3、組合體分離時,在機械力的作用下,兩個太空飛行器逐漸遠離,由於作用力的不平衡性,可能會出現較大的姿態擾動,對正常撤離產生一定的影響。如何控制好兩個目標的相對姿態,保持好相對導航,也是二次對接任務的重點之一。
