
簡介
新近出版的《城市道路設計規範》[CJJ37-90](以下簡稱《規範》), 第3.2.3條規定。信號燈管制十字形交叉口的設計通行能力按停止線法計算。
停車線法的原理是逐個路口、逐條車道計算,然後匯總求得交叉口總的通行能力。
計算方法
在運用停車線法計算通行的過程中,必然會涉及直左車道中左轉車所占比例β’,計算的問題。根據本面進口道直、左、右車的設計比例解算直左混行車道中左轉車所占比例β’的計算方法、公式,並設定左轉專用車道的理論界限。
與飽和流率的關係
 車流通過停車線的基本運動特性
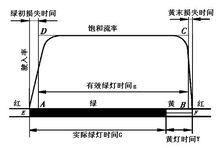
車流通過停車線的基本運動特性車流通過停車線的基本運動特性如圖1所示,實際上表示的是停車線截面上駛入流率-時間的變化情況。其基本模式是由克萊頓(Clayton)於1940-1941年提出來的。後來,沃喬普(Wardrop),韋伯斯特和柯布(Cobbe)等學者沿用並發展了克萊頓的模式,使之成為我們看到的這樣一個圖式。
為了糾正綠燈間隔時間由“黃燈時間+全紅燈時間”組成的傳統錯誤概念,圖中用文字“慢車最大清空時間與快車最小進入時間的差”代替了原圖的“全紅燈時間”。
從圖1可見,在綠燈信號開始的最初幾秒,流率變化很快,這是由於車流正處於起步和加速階段,在此期間,通過停車線的車流流率要比飽和流率低。同理,在綠燈結束後的黃燈期間,因嚴禁闖紅燈,有部分車輛已經開始減速,採取了制動措施,故通過停車線的車流流率便由飽和流率逐漸地降下來。
有一點值得注意,只有當綠燈期間停車線後始終保持有連續車隊時,車流越過停車線時的流率才能穩定在飽和流量水平上。圖1所表示的正是一個完全飽和的實例,即在通行結束前,始終都有車輛連續不斷地通過停車線。
圖1中矩形ABCD所包圍的面積與實曲線包圍的面積相等,恰好等於一次綠燈放行實際通過交叉口的車輛總數。矩形ABCD的高度為飽和流率,長度為有效綠燈時間,即一周期內能夠用於以飽和流率通行的時間,等於實際綠燈時間與黃燈時間的和,再去掉起動損失時間。 從圖1可以看出,綠燈信號的實際顯示時間段與有效綠燈時間區段是錯開的。在綠燈開始初期,車流難以飽和流率進入,因此損失的通行時間,稱為綠初損失時間;臨黃燈結束末期,越過停止線的車流已非飽和流率,因此損失的通行時間,稱為黃末損失時間;綠初、黃末非飽和損失時間合併稱為起動損失時間。
