
交會和對接
正文
發展概況 1965年12月15日,在航天員參與下“雙子星座”7號和“雙子星座”6號(見“雙子星座”號飛船)在同一軌道上以同一速度飛行,有時相距僅10厘米左右,實現了世界上第一次空間交會。1968年10月26日蘇聯“聯盟”2號和“聯盟”3號(見“聯盟”號飛船)成功地實現了空間軌道自動交會。1969年 7月16~24日“阿波羅”11號(見“阿波羅”工程)成功地實現了人類第一次月球著陸。登月艙與指揮艙在月球軌道上實現了交會和對接。1975年“聯盟”號飛船與“阿波羅”號飛船的對接成功表明:從兩個不同場地發射的太空飛行器也能實現交會(圖1 )。1984年“挑戰者”號太空梭成功地修復了在地球軌道上已經失效的衛星,標誌著太空飛行器交會和對接技術進入了新的發展階段。 交會和對接
交會和對接①遠程導引階段:控制受控太空飛行器的質心運動,將它導引到將要對接的目標太空飛行器附近。這時兩個太空飛行器的距離小於 100公里。受控太空飛行器接近對接目標有兩種方案:直接從發射軌道接近目標和從停泊軌道接近目標。第一種接近方案的前提是精確的發射準備並對發射時間(發射視窗)有嚴格的要求。否則受控太空飛行器就不能進入目標太空飛行器的軌道,兩者的飛行方向也不能在同一平面內。若採用變方位發射技術,則既可加大發射視窗又可使受控太空飛行器進入計算的對接軌道。第二種接近方案中,要先把受控太空飛行器導引到停泊軌道(一般選取與目標軌道共面的圓軌道),然後在適當的時刻進行定向機動和軌道變換。軌道變換可採用霍曼變軌(見霍曼軌道)和雙橢圓變軌方法。遠程導引階段的基本要求是保證對接時間和導引精度,並且燃料消耗最少。
②近程導引階段:利用受控太空飛行器上的導航設備把受控太空飛行器引入交會區。近程導引有兩種方法。第一種是軌道導引法。採用這種導引方法時必須先知道目標的軌道參數,並在受控太空飛行器上帶有確定自身與目標相對運動參數的設備和計算機。這種導引可用脈衝控制或持續控制方式實現。雙脈衝方法最簡單,而且燃料消耗少,但導引誤差較大。而持續控制,如最佳導引控制則精度較高。最佳性能指標一般是在燃料消耗最少、導引過程最快和導引精度最高之間折衷選定。第二種是自主導引法。這種方法能夠在不知道對接目標的軌道參數的情況下,用比較簡單的設備完成近程導引。常用的自主導引方法有直接導引法、前置點法和平行接近法。第二種導引方法雖然燃料消耗比第一種方法多,但是簡單可靠。
③停靠階段:受控太空飛行器以零或接近於零的相對速度靠近對接目標。當兩個太空飛行器相對距離為 30~300米時,以1.5~3米/秒的相對速度進入停靠階段。停靠控制採用小推力發動機,常使用6個發動機。它們裝在太空飛行器的三個相互垂直的坐標軸上,能在任何方向上產生控制加速度。在停靠過程中,太空飛行器姿態控制系統應當保持兩個對接太空飛行器的相對姿態,以滿足停靠和對接時的要求。
對接 通過專門的對接裝置使受控太空飛行器與對接目標相互接觸,並通過對接機構把二者連線成為一個整體。對接通常都是在航天員的指揮和操縱下進行的。例如“雙子星座”號飛船與“阿金納”號火箭的對接過程(圖2),當兩者相距300米左右、相對速度為1.5~3米/秒時,航天員調整飛船通過手控完成對接,隨後“阿金納”號火箭的對接環與飛船的小頭緊密配合,連成一個整體。這個對接機構吸收衝擊負荷的能力大約為0.5米/秒。(參見彩圖)
 交會和對接
交會和對接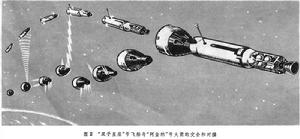 交會和對接
交會和對接