
基本概念
滯後
滯後是指一個事物的出現或發展比預計的時間晚,或比相關聯的其他事物的出現或發展晚。滯後有因停滯或阻滯而落後的意思。
在控制理論中,滯後指在時間上被控變數的變化落後於擾動變化,是一種十分常見的現象。因為在實際工業生產中,控制通過往往不同程度的存在滯後情況 。見時滯控制系統。
一般將控制系統中的滯後分為容量滯後和純滯後。
純滯後
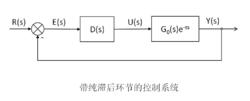
純滯後是指,在物料、能量或信號傳輸過程中由於傳輸速度有限而產生的延遲。一般純滯後就是指由傳輸速度限制導致的滯後。帶純滯後環節的控制系統如下圖所示。
 Smith預估控制
Smith預估控制史密斯預估控制
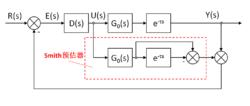
史密斯預估控制是一種純滯後補償控制,其通過引入一個和被控對象並聯的補償器對純滯後進行削弱和消除。史密斯預估器的引入如下圖所示 。
 Smith預估控制
Smith預估控制套用與意義
實際預估器
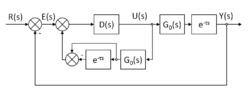
從現實的操作出發,實際上的史密斯預估器通常不是並聯在被控對象上的,而是反向並聯在控制器上的,如下圖所示。
 Smith預估控制
Smith預估控制套用效果
 Smith預估控制
Smith預估控制經過史密斯預估器的補償,純滯後環節被轉移到了閉環控制迴路之外,因而不會對系統產生不利影響。由拉氏變換的位移定理可知,純滯後特性只是將原輸出信號推移了時間,不會改變輸出信號的波形和性能表現。
意義
在工業過程中,被控對象或多或少存在一定的純滯後特性,純滯後特性往往使系統穩定性降低,動態性能變壞,可能引起超調和振盪;史密斯預估器的引入很好的補償了大遲延對象的純滯後特性,提高了系統的穩定性和動態性能。對於以穩定性為首要要求、快速性為次要要求的系統,史密斯預估器十分有效。
