
原理
設被控對象受到干擾 Di(t) 的作用時,被控變數 y(t)的不變性可表示為:當 Di(t)≠0 時,則 y(t)=0 (i=l,2,…,n) ,即被控變數 y(t)與干擾 Di(t) 獨立無關。基於不變性原理組成的自動控制稱為補償控制, 它實現了系統對全部干擾或部分干擾的不變性,實質上是一種按照擾動進行補償的開環系統。
補償控制首先求出滿足性能指標的控制規律,然後在系統中增加補償控制器,來改變控制器的回響,從而使整個系統獲得期望的性能指標。
分類
前饋補償
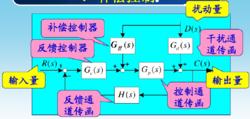
(1)按控制量補償:將控制輸入量R(S)經過處理(Gc(S))後,直接向前傳遞,並與主控制器的輸出進行疊加。控制信號直接作用到被控對象,構成開環控制的補償。
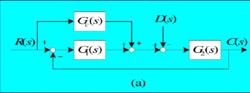 補償控制
補償控制(2)按擾動量補償:將系統的擾動輸入量D(S)經過處理(Gc(S))後向前傳遞,與主控制器的輸出進行疊加。增加擾動信號的前向通道,利用雙通道原理來補償干擾。
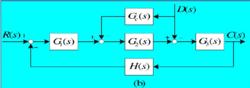 補償控制
補償控制反饋補償
即反饋校正,在主控制器反饋迴路中增加一個控制器。
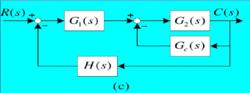 補償控制
補償控制串聯補償
即串聯校正,將補償器與主控器串聯起來。
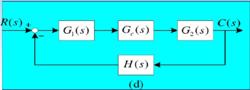 補償控制
補償控制前饋控制
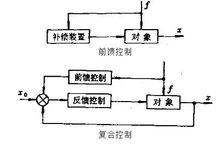 圖1
圖1前饋控制是按擾動量的變化進行控制的,是一種擾動補償或按擾動控制,是一種開環控制,如圖1。根據不變性原理(即擾動補償原理),要實現擾動補償,就必須使用補償裝置,使擾動點與被控量之間具有兩個通道,並且使與動態特性的大小相等,符號相反,才能實現完全補償。如果兩個通道僅放大係數相等,則僅能實現靜態補償。通常,前饋控制不單獨使用,而是與反饋控制同時使用,即組成複合控制系統,同時按偏差與按擾動調節。
前饋控制的控制原理及缺點
系統出現擾動時,立即將其測量出來,通過前饋控制器,根據擾動t的大小來改變控制量,抵消或減小擾動對被控量的影晌。被控量的偏差並不反饋到控制器,而是將系統的擾動信號前饋到控制器,故稱前饋控制。
前饋控制是開環控制,在控制過程中不測取被控參量信息,只對指定的擾動量進行補償;對指定的擾動量,由於數學模型的簡化、工況的變化及對象特性的漂移,很難實現完全補償;系統的干擾因素較多,若對所有的擾動進行測量井採用前饋控制,增加系統的複雜程度,而有些擾動量無法測量,不可能實現前饋控制。
引入前饋控制的原則
在系統中引入前饋控制應遵循的原則:
(1)系統中的擾動量是可測不可控的。若干擾不可測,前饋控制無法實現。若干擾可控,可設定獨立的控制系統予以克服。
(2)系統中的擾動量的變化幅值大、頻率高。高頻干擾對被控對象的影響很大,易導致持續振盪 。採用前饋控制,可以對干擾進行同步補償控制,獲得較好的控制品質。
(3)控制通道的滯後較大或干擾通道時間常數較小。
動態前饋控制
當被控對象的控制通道和干擾通道的傳遞 函式不同時,或對動態誤差控制精度要求很高的場合,必須考慮採用動態前饋控制方式。
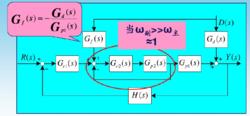
動態前鑲控制的原理是:通過選擇適當的前饋控制器,使干擾信號經前饋控制器至被控量通道的動態特性完全複製對象干擾通道的動態特性,但符號相反,以實現對干擾信號的完全補償。動態前饋控制可使系統靜態偏差等於或接近於零,又可使系統的動態偏差等於或接近於零。
前饋-反饋控制
前饋控制器用來消除主要擾動量的影響;反饋控制器則用來消除前饋控制器不精確和其它不可測干擾所產生的影響。
 補償控制
補償控制前饋一串級控制
如果被控對象的主要干擾頻繁而又劇烈,而生產過程對被控參量的精度要求有很高,可以考慮採用前饋一串級控制方案。
 補償控制
補償控制大遲延系統
大延遲過程是指廣義對象的時滯與時間常數之比大於0.5 。工業生產中典型的大延遲過程有傳送物料能量、測量成分量、皮帶運輸、帶鋼連札機、以及多容量、多種設備串聯等過程,都存在較大的時滯時間。延遲對系統品質具有較大影響,如使閉環特徵方程中含有純延遲因子、減低系統的穩定性等。
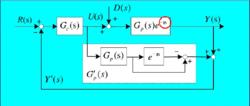 圖2
圖2大遲延控制過程是較難控制的,為了改善大遲延系統的控制品質,1957 年史密斯提出了一種以模型為基礎的預估器補償控制方法,即Smith 預估器。它的特點是預先估計出過程在基本擾動下的動態特性, 然後由預估器進行補償,以減小超調量和加速調節過程。Smith預估器的原理圖如圖2所示。
Smith預估器是一種以模型為基礎的預佑器補償控制方法。其設計思想是預估出過程對擾動的動態回響,並將預估結果作為反饋提早供給控制器動作,以提前對擾動進行補償。採用Smith預估補償控制方法可以消除純滯後環節對控制系統品質的影響。
