
簡介
按其性質可分為兩大類:自然航行障礙物,如礁石、淺灘、海草等;人為航行障礙物,如沉船、漁礁、漁柵和海上養殖場等。在海道測量中,常用水深加密測量、掃海測量等方法,對航行障礙物進行專門探測,以詳細確定其精確位置、性質、最淺深度和分布範圍。航行障礙物是航海圖的重要要素之一,在各種比例尺的航海圖上,均要優先選取。對一些據報的航行障礙物資料,有時也要表示在海圖上,註記出“概位”、“疑位”、“疑存”等字樣,以供航海人員參考 。
主要航行障礙物的介紹
1.礁石:有暗礁、乾出礁、適淹礁、明礁、叢礁等 。
2.淺灘:淺灘是指水深比周圍較淺的淺水區,這在江河入海的河口地段和低海岸的沿岸地區較多。例如長江口和沿海就有較大的淺灘。對於個別小範圍的淺灘,海圖上明礁符號中虛線內的數字表示最淺深度。其與暗礁的區別在於淺灘為非危險性底質,如沙、硬泥等。淺灘又分為沙灘、泥灘、岸灘、沙礫灘、亂石灘、叢草灘、貝類養殖灘及紅樹灘等 。
3.沉船:沉船對航行有很大的威脅,按其沉沒的狀態可分為兩類:一類是部分沉沒的沉船;另一類是全部沉沒的沉船。部分沉沒的沉船,是指沉船的一部分(包括桅桿)在深度基準面以上。
此外,還有石坡、沙咀、險惡地、漁柵,以及掉入海中的鐵錨、沉入海底供建築用的水泥樁等,這些都是航行障礙物 。
4.沉樹及其他類似沉物。
5.礙錨區。
探測航行障礙物的重要性
最淺點的水下深度小於船的吃水深度的,是最危險的航行障礙物。因為這些障礙物都在水下,航海人員難以用肉眼看到,測深儀和側掃聲納等儀器也只能探測到船底和兩側近處的海底情況,而航船具有巨大的慣性,一旦發現障礙物已來不及躲避,就很可能會擱淺、觸礁沉沒。即使是明礁,雖然大潮高潮時也露出水面,但因體積較小,在能見度較低時也難以及時發現。因此,在海圖上,上述航行障礙物都用比較明顯的符號表示,並且要求位置精度準確、性質標示明確、延伸範圍表示正確。深度大於船的吃水深度的障礙物則用略為不明顯的符號表示,如沉船深於18米的周圍不加點線,有的國家對深於20米或50米的上述障礙物乾脆不表示。為此,船舶航行前做計畫航線時應做在遠離上述障礙物的地方,航行時則要及時定位,不要偏離計畫航線太遠,一旦偏離就要及時糾正航向。
航行障礙物的探測方法
航行障礙物探測是測定江河湖海中有礙艦船航行安全的地物、地貌的工作。礁石、淺灘、海草、沉船、漁柵和海上養殖場等障礙物,是艦船航行的主要威脅。航海人員需要詳細掌握所航行海區的障礙物情況,以選擇安全航線。在海道測量中,常用水深加密測量、掃海測量等方法,對航行障礙物進行專門探測,以詳細確定其精確位置、性質、最淺深度和分布範圍,並表示在各種比例尺航海圖上 。
 水下障礙物探測方法
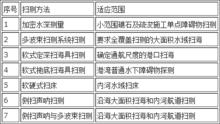
水下障礙物探測方法航行障礙物的探測的主要方法包括:測掃聲納探測、單波速加密探測、掃海工具探測和磁力儀探測等。
加密水深測量
加密水深測量的內外業工作與前述之水深測量內容相同,用於水下障礙物探測的加密水深測量的主要技術要求是:
1.測深線間距不得大於圖上0.5cm,一般應控制在2~3mm。
2.對1/5000以下測圖、應放大比例尺探測。
3.探測結果必須明確障礙物範圍、定位,深度、大小尺寸及性質。
4.探測後應提交水深圖和探測報告。報告格式與普通掃測報告相同 。
多波束全覆蓋掃測
多波束全覆蓋掃測系統已在國際上推廣套用,我國也引進了日本和德國多套多波束掃測系統,但用於掃海測量較多的是日本四波束掃測系統。天津海監局取得了豐富的使用經驗。現以日本四波束系統為例說明掃測的實施和技術要求如下 :
1.四波束掃測系統的外業工作:
換能器安裝:
(1)在港池宜採用懸臂對稱排列法;在航道宜採用船舷式對稱排列法。
(2)全覆蓋掃測換能器排列,必須使多波束在海底有重疊,其重疊寬度不得小於2cm。非全覆蓋掃測,換能器排列使各波束在海底漏空不大於2~3m。
(3)換能器必須斜置時,最大傾斜角應小於發射角的一半;因扭偏換能器探頭所造成的深度偏深,其誤差不應超過水深的1.5%。
(4)測前、測後對扭偏角指示器進行校正。
(5)四個換能器的靜吃水應取同一值。
(6)換能器桿應垂直於水面,懸臂式安裝還必須使懸臂保持水平。懸臂長度一般不得大於1m 。
2. 四波束掃測系統掃測工作的實施:
(1)儀器校準:
每天測前、測後均套用校準器檢定儀器綜合改正數,一般可只在一個換能器下進行。測前、測後所測改正數之差不得大於0.1m。
(2)誤差估算:
當因風浪影響,測深記錄紙上波峰、波谷之差大於0.4m時應停止作業。在此限制範圍內,對無縱傾橫搖補償裝置的儀器,應進行船體傾斜觀測,並估算測深誤差 。
(3)掃測方法與掃趟寬度:
①泊位掃測方向應垂直於碼頭方向。
②進行泊位掃測,應清晰反映碼頭零米線至8m線範圍內的深度情況。
③航道掃測方向應平行於航道並以旋轉座標實施定位儀導航,掃測位置應避免邊坡水深向航道內位移,形成虛假淺點。
④港池掃測方向應根據地形及碼頭(突堤)情況布設垂直或平行於順岸碼頭方向,並便於用導標導航。
⑤掃趟有效寬度計算 。
(4)掃測定位:
①掃測定位方法主要有DGPS、微波定位儀、經緯儀前方交會和極座標法四種,為了保證測線不致於偏離過大,一般可用導標導航。
②定位中誤差的估算公式與水深測量相同。
③定位中心應與四個換能器的對稱中心線重合,兩中心無法重合時,必須保證橫向偏差為零,縱向偏差不超過1.0m,否則,應改正。
④定點陣圖形重合應確保定位精度,並儘量使E最小,以便使有效寬度達到最大。
⑤定位儀器的校驗與水深測量相同。
⑥微波定位,船台高度不得小於3m(水面起算) 。
(5)儀器操作:
掃測過程中的儀器操作應嚴格執行其說明書的操作規程。
(6)潛水探摸:
對港口工程及疏浚、炸礁等施工過程中的礙航物及淺點的探測應根據探測目標概位或重點探測地段的水域情況布設掃趟方向,並滿足更高的海況要求,掃到障礙物後應潛水探摸 。
(7)處理誤差:
當決定通航尺度的掃測深度與疏浚竣工驗收之中所提出的深度不符,而且呈現系統性規律時,或發現有淺於設計深度的淺點(淺區)時,應另選更好的海況條件(自然海底處測深記錄紙上波峰、波谷之差應小於0.3m)對測區進行復掃。並應以四倍掃趟寬度進行垂直方向上的掃測,重複掃趟1cm範圍內比對深度之差不宜大於0.3m,而且應成偶然誤差性質。否則,應查明原因,全部重測 。
(8)測深儀回波記錄線:
①必須同時記錄4條測深回波線;
②根據掃區水深,應預先將4條另線旋轉在第一檔,其顯示間距宜為2m,4條測深回波線應旋轉在第二檔;
③測深回波記錄線應清晰可辨,其相鄰回波線的顏色應有深淺區別 。
3.補掃:
(1)遇有下列情況,應在其相應部位進行補掃:
①顯示在測深記錄紙上的波峰、波谷之差通航水域內不超過0.3m,非通航水域不超過0.4m;
②重疊寬度小於定位中誤差1.5倍,或有效寬度未覆蓋的地段;
③發現可疑回波信號;
④相鄰回波線交錯而不能辨別;
⑤其他可疑情況。
(2)可疑信號。特別是障礙物信號的補掃方向與原掃測方向相同,為證實障礙物寬度、範圍,補掃方向應與原掃測方向垂直 。
