無人採煤工作面系統
綜采工作面是現代化煤礦生產的主要環節,是煤礦生產中設備最多、環境最惡劣、工作最複雜的系統,至今一直是各國大力研究的課題。智慧型化綜采工作面控制系統,實現採煤作業的自動化控制以及遠程遙控;通過採煤機記憶截割調節控制,採煤機、支架電液控制、運輸系統的整體協調控制技術,實現設備的就地/集中/遠程三級網路管理,系統能夠根據運輸系統負荷的大小,自動調控採煤機的生產能力;通過無線網路覆蓋,實現移動設備採煤機在工作面環境下的可靠通訊,視頻、語音、數據三網合一,解決整個作業面的通訊瓶頸,割煤過程視頻自動跟蹤監控;根據設備之間感測器的物聯網技術,實現相關設備的姿態識別,故障提前預警,實現工作面協調、安全、可靠的生產。整個項目技術達到國際先進水平。
採用先進的數位化控制技術,實現工作面綜采自動化是21世紀採礦工業的研究熱點,能夠提高我國煤炭生產設備的研究設計與生產製造能力。
系統組成
 無人採煤工作面系統
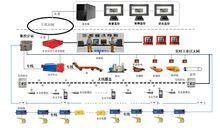
無人採煤工作面系統如圖所示。整個系統包括以下十個子系統。
1) 地面調度中心綜采作業面數據監控與三維展示子系統
2) 井下順槽設備列車的集控平台與軟體子系統
3) 有線通訊網路及無線覆蓋子系統
4) 綜采工作面視頻監控子系統
5) 具有遠程測控和姿態檢測的智慧型化採煤機
6) 支架姿態檢測及支架電液控制子系統
7) 刮板、轉載、破碎、皮帶運輸連鎖控制與工況檢測子系統
8) 供電設備及數據監控子系統
9) 泵站控制與數據監測子系統
10) 刮板機俯仰傾角及曲直變化檢測感測器子系統
通過建立工作面實時工業乙太網與無線覆蓋網路,將各個相關設備聯繫在一起,實現與各個裝置的數據通訊。在順槽集控中心實現對工作面設備的遠程控制,設備包括:採煤機、支架、刮板輸送機、轉載機、破碎機、負荷中心、泵站。對每個設備的工況數據採集、存儲、顯示、報警,遠控。以採煤機位置為坐標,實現對採煤機與支架的視頻跟蹤切換,完成對整個工作面設備的可視化管理。
通過構建由井下順槽控制中心、綜采工作面有線/無線全覆蓋網路、設備遠程控制與語音通訊系統、工作面視頻監控系統、數據分析與診斷預警、工作面設備姿態檢測系統、轉載機、破碎機、泵站以及膠帶輸送機的連鎖控制等組成的自動控制平台,實現工作面液壓支架、大型採煤機、刮板輸送機的協調控制,完成綜采工作面生產過程自動化控制功能,提高生產效率;並對主要生產設備工況的實時線上監測、及時發現故障隱患,提高設備開機率;將採集到的數據通過煤礦的高速信息網路傳輸到地面的調度中心,在地面調度中心設定存儲伺服器,對相關數據進行存儲、顯示和分析,實現數據共享與遠程管理。
主要研製內容
智慧型化綜采工作面集控平台主要包括:井下順槽控制中心與地面操作平台;採煤機、支架、刮板輸送機聯動控制裝置及工藝控制軟體 ;綜采工作面的通訊網路系統;工作面視頻圖像監控系統;相關設備的數據通訊規約及數據採集分析軟體,乳化液泵站。
智慧型化綜采工作面集控平台,包括採煤機、支架、泵站、刮板輸送機、破碎機、轉載機、皮帶輸送機等設備的工作狀態的監測與生產運行自動化集中控制,通過與視頻監控技術的結合,實現上述設備的遠程遙控操作。順槽控制中心採用高性能的防爆計算機和實時資料庫採集軟體,組成井下數據採集與監控系統,採用綜采工作面專用控制裝置,實現相關設備的控制。設計視頻監控平台,實現對整個工作面的可視化圖像監控。最終實現在順槽控制中心對整個工作面生產情況與設備工況的實時監測,完成對採煤機實現遠程啟停/換向/加減速/調高/噴霧等操作控制,每個支架動作的遠程控制與成組遠程操作控制,根據工藝要求實現採煤機與支架電液控制系統的調協控制、根據運輸系統自動調控採煤機運行、運輸程式閉鎖、保護與報警。分析軟體對歷史數據和實時數據進行分析與記錄,還有許可權管理功能。實現整個工作面設備的視頻化遠程集中控制,並結合高速通信技術實現工作與生產信息的網路化遠程傳輸與人員視頻對話功能;
地面操作平台與順槽控制中心實現1000兆寬頻數據通訊網路,可對工作面設備運行工況與生產情況進行實時觀測,並可在緊急情況下對採煤機、支架、三機、泵站與皮帶進行急停的網路化遠程干預控制。地面集控中心的計算機對無人綜采工作面的二維或三維模擬仿真,並實現與工作面可視系統的視頻信號結合,實現模擬場景與現實場景一體化與隨意切換; 如下圖所示:
 無人採煤工作面系統
無人採煤工作面系統通訊網路平台
採用有線網路與無線網路相結合的通訊技術,採用無線網路為工作面移動設備數據傳輸提供了通道,為工作面自動化的實現起到了關鍵作用。通過該網路實現採煤機的工作狀態監視與控制和視頻圖像的實時跟蹤。
在煤礦的綜采自動化控制系統中要想實現操作人員離開工作面,實現綜采設備的遠程控制,必須通過有線或無線的通訊方式實現對採煤機的數據採集與監控,採煤機作為一個移動的設備,採用有線通訊的方式。這種通訊方式,由於電纜的摺疊與移動,經常發生斷線,維護困難。再加上與動力電纜同纜傳輸,信號干擾嚴重。更好的通訊方式為無線通訊。在本項目中,實現整個工作面的無線覆蓋,實現與採煤機的數據通訊、視頻傳輸,不僅滿足通訊頻寬的要求,而且避免拖纜中來回摺疊產生的光線或電纜折斷的問題,屬於關鍵的技術。
綜采可視化
綜采工作面可視化無線監控系統是專業為煤礦綜采工作面量身打造的集視頻監控、網路傳輸、無線手機通訊為一體的井下無線網路平台。針對工作面大粉塵、照明差、區域狹長、設備動作複雜不宜敷設固定線路等特點,為可視化綜采工作面提供最佳解決方案。實現對整個工作面的可視化遠程控制,是整個系統的重要組成部分。
通過視頻監控系統傳送的工作面圖像,操作人員才能根據煤層變化情況、滾筒截割情況、支架狀態等信息,必要時對採煤機進行遠程干預,干預操作功能與操作人員跟機作業時相同,可實現採煤機所有動作的干預。通過遠程干預可以避免在地質條件變化或煤層變化時採煤機切割到岩石等情況的發生。自動跟蹤實時視頻監控系統,對工作面設備安全運行提供了有效的保證。
工作面視頻圖像監控系統是實現工作面可視化的重要組成部分,將視頻數據通過無線網路和有線網路相結合的通訊方式傳輸到工作面集控平台,實現圖像自動跟著採煤機移動功能,採煤機運行到什麼地方,對應位置的視頻圖像實現切換。實現對採煤機的隨機監控。針對工作面煤塵大,採用氣體保護技術實現對鏡面的專利保護技術。使操作司機通過視頻畫面隨時了解現場情況。通過智慧型化綜采工作面集控平台實現對現場設備的遠程干預。
實時控制系統
1) 採煤機與支架電液控制系統的整體協調控制技術
該技術將採煤機的自動記憶截割和支架根據採煤機位置自動追機拉架和實時視頻跟蹤看成一個整體的控制工藝,實現整體協調、安全保護與可視化控制。
智慧型化綜采工作面集控平台可以根據採煤工藝的要求,設定不同的工作模式,實現支架、採煤機與刮板輸送機等設備的協調聯動控制。通過仿真還原採煤機的工作姿態和支架的工作姿態,計算各設備時間的相對位置關係,預測各個設備之間的運行軌跡,實現不同設備間聯動閉鎖;實現採煤機的記憶截割功能,結合採煤工藝,完成支架與採煤機的跟機作業,斜切進刀、調斜等功能要求,將整個工作面聯繫成一個有機的整體。
按照定位與導航技術控制採煤機自動割煤,控制支架根據採煤機位置實現自動追機拉架。實現工藝要求的斜切進刀、端頭掃底煤等各種工藝的遠程協調控制,對於綜采工作面採煤機的自動截割技術以及支架電液控制技術,均是獨立的控制系統,還未實現工作面整套綜采裝置的整體協調控制。將工作面整套裝置作為一個控制的整體,對採煤機自動記憶截割和電液控制系統的拉架、推溜、打護幫板、收護幫板以及間架噴霧等隨機聯動控制。採用嵌入式防爆計算機與採煤機和電液控制系統通訊,通過程式智慧型化控制軟體進行綜采設備整體與整個作業流程的自動控制、適應、保護、調整和修復。同時,採用視頻實時跟蹤技術,實現工作面設備可視化遠程自動操控。
2) 根據運輸系統的負荷大小,自動調控採煤機的生產能力
主要通過採煤工藝智慧型化控制系統來實現,採煤機採煤速度與刮板機運輸系統存在負荷匹配關係,採煤機與支架移架速度也存在相互協調配合的問題。通過採煤工藝智慧型化的協調控制,使工作面整體系統工作在最佳狀態,實現工作面協調、安全、可靠的生產。以運輸系統的負荷參數控制採煤速度,實現設備之間的均衡作業;通過調節採煤機截割高度和運行速度。
工作面運輸系統與採煤機僅有起停上的邏輯連鎖,沒有負荷上的調節配合,經常出現設備過載停機,採煤速度的調控靠人員進行調節。本項目中,我們將設備負荷的自動調節,納入整個採煤工藝智慧型化控制系統中。當刮板輸送機承載狀態發生變化時或刮板輸送機過載時,採煤機將自動改變割煤速度、深度來調整生產能力。即根據運輸系統的負荷變化,自動調控採煤機的牽引速度,調整生產能力。
3) 遠程人工干預與記憶截割相結合的採煤機控制技術
由於綜采工作面地質條件和環境極為複雜,因此採煤機在不同的位置采高控制不是固定的,需要根據頂板岩層的變化而變化。其牽引速度也是根據負荷而變化。因此,採煤機需要通過人為操作一個循環割煤周期自學習一遍。在遠程遙控時,採煤機將根據學習時的記憶數據進行割煤。但是如果工作面情況與學習記憶數據極端不一致時,需要人為手動干預,這時,需要清晰的視頻圖像作為干預控制的基礎。綜采工作面工況複雜,靠感測器不能檢測到所有的現場情況,採用攝像機觀察工作面的情況是不可缺少的監控手段,與感測器相互配合,是操作司機能夠遠程操作的重要依據,是人目視範圍的延伸,因此,可視化與記憶截割相結合,才能實現真正的遠程遙控。但由於工作面煤塵較大,影響攝像機視頻圖像的清晰度,對此,我們專門對前端攝像機採取了氣體防塵的專利技術研究。對網路通訊採用無線傳輸技術。通過軟體實現採煤機遠程可視化控制。
系統實現目標
1) 通過視頻監控系統,對安裝感測器無法完成的設備狀態進行可視化監視,實現工作面的可視化管理。
2) 通過建立有線、無線通訊網路,實現與各相關設備數據的採集與遠程控制。
3) 通過採集刮板機的傾角和順槽的標高,建立資料庫存儲相關數據,反應整個工作面的地形情況和煤層走向。控制採煤機的臥底量,避免刮板機垂直彎曲度大於3度,實現刮板機與順槽的平滑過渡。
4) 通過採集兩節刮板機的夾角,反應刮板機是否在一條直線及彎曲段的位置,將此數據發給支架電液控制系統,調節推移油缸步距,最終實現工作面的調直。
5) 通過採集採煤機的位置信號,作為整個記憶切割和追機拉架的坐標,實現端頭的精確定位,免避採煤機超出行程割斷電纜,並實現視頻圖像的跟機切換。
6) 採集採煤機機身和搖臂傾角,計算出採煤機的采高和臥底量,控制採煤機的運行。
7) 通過採集採煤機的振動、聲音和負荷,給操作司機提供採煤機是否割到岩石的判斷信息。
8) 通過採集採煤機的電流和速度,實現採煤機速度的閉環控制,調節不同位置的牽引速度,並結合運輸系統的負荷大小,控制採煤量。
9) 通過採集電液控制系統前護邦、伸縮梁是否收回的判斷信號,與採煤機控制相配合,避免出現與支架的干涉與碰撞。
10) 通過採集電液控制系統支架頂板的傾角,調節頂板支護情況,使頂板儘量平直接頂,避免出現支架的“翹架”,並與左右領架比較,對出現異常情況進行報警。
11) 通過採集支架間人員定位,給操作司機遠程控制提供信息,避免出現安全隱患。
12) 通過採集支架的立柱和前護邦的壓力,判斷支架是否支護到位,當壓力小於初撐力時,系統進行自動補壓預緊。並將相關壓力數據上傳調度中心,實現綜采工作面礦壓監測。
13) 採集支架推移油缸的行程,通過行程判斷支架是否拉架到位,與採煤機的位置和速度相比較,如果拉架滯後超過設定範圍,調節採煤機的速度,使採煤機位置和拉架在設定範圍之內。
14) 根據採煤工藝,建立控制流程,控制採煤機、支架和刮板機按設定的流程和步驟進行運行。
15) 採集刮板機、破碎機、轉載機的溫度信號,當溫度到達設定的預警值時提前報警。當溫度超過了停機設定值,急停設備。
16) 採集採煤機、刮板機、破碎機和轉載機的水流量和壓力值,實現提前預警,當超過設定的停機值時,急停設備。
17) 採集採煤機、刮板機、破碎機、轉載機、自移機尾和皮帶的開停機信號,實現設備的聯鎖啟停。
18) 採集設備的開關量報警信號,顯示報警。當收到報警停機信號時,聯鎖停機。
19) 採集設備的電流、電壓和功率,判斷設備的運行負荷,過載保護停機。
20) 採集採煤機、刮板機、破碎機、轉載機、自移機尾和泵站的油溫和油位信號,顯示報警,當收到報警停機信號時,聯鎖停機。
21) 採集採煤機軸承振動感測器報警信號,顯示報警。當收到報警停機信號時,聯鎖停機。
22) 將工作面的相關數據傳輸到地面,實現在地面進行數據的存儲並通過計算機網路實現共享,達到生產管理信息化。
結束語
無人值守的煤礦綜采工作面自動化控制,是21世紀採礦工業的研究熱點,能夠提高我國煤炭生產設備的研究設計與生產製造能力。
