
電路介紹
 模擬控制電路
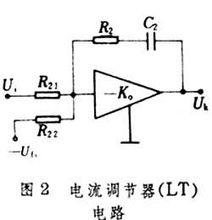
模擬控制電路以電流調節器為例,電流負反饋與另一個調節器構成的閉環置於速度環以內,稱電流環,該調節器稱為電流調節器,用LT表示。為了獲得良好的靜態與動態性能,兩個調節器都採用比例積分(PI)調節器。在運算放大器反饋迴路中串入電阻 R2和電容 C2(圖2), 構成比例積分調節器。如選擇 R21= R22=22千歐,則其輸出電壓為式中 T2= R2 C2 S為復頻率。上式表明,比例積分調節器的輸出電壓 Uk由比例運算和積分運算兩部分組成。比例部分迅速反映調節作用,積分部分最終消除靜態偏差。
電流調節器中,從主電路採樣輸出電壓到控制電路中,且輸出電壓可以在任一數值連續變化,因此屬於模擬信號,控制電路中的模組均具備處理模擬信號的功能,因此屬於典型的模擬控制電路。
 模擬控制電路
模擬控制電路雙環控制
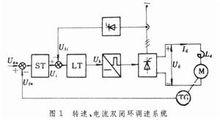
速、電流雙閉環調速系統電路中的控制信號、調節器輸出的各物理量都是時間的連續函式,它們構成一個模擬控制電路,其中速度負反饋與一個調節器構成的閉環作為外環,稱速度環,該調節器稱為速度調節器。
 模擬控制電路
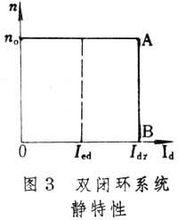
模擬控制電路雙環系統的靜態工作情況如下:給定信號與速度反饋信號比較後,加在ST的輸入端。電動機的速度由給定信號確定,ST輸出 Ui作為電流給定信號加在LT的輸入端,LT的輸出 Uk送至觸發電路對晶閘管整流電壓 Ud進行控制,以保證電動機在給定速度下運轉。穩態時,兩個調節器的放大倍數均為調節器的開環放大倍數 K0。因為 K0足夠大,這時ST、LT的輸入信號都幾乎為零。因此,可以認為該系統是無差系統。ST的輸出限幅即為最大電流給定值,正確地整定ST的輸出限幅值,即可保證主迴路電流不超過允許值。雙環系統的靜特性如圖 3所示。在正常負荷時,速度調節器ST不飽和,依靠ST的調節作用,保證系統具有絕對硬的靜特性(無靜差)。這時電流調節只起輔助作用。負載電流的大小由電壓給定值 Ui決定。但由於ST具有輸出限幅,所以當電動機的負載力矩過大時,ST進入飽和狀態,失去調節作用,速度環呈開路狀態。在固定的最大給定電流作用下,依靠電流環對電流進行調節,這時系統由恆轉速調節轉變為恆電流調節。由於電流調節器也是PI調節器,所以可以實現電流的無靜差調節,從而得到了下垂特性,如圖中的AB段所示。
PLC模擬
套用最廣泛的自動化設備當屬 PLC,它在處理數據和模擬量等功能時,可靠性高,儘量減小誤差範圍,抵抗干擾的效果佳。在企業發展旅程中,技術人員怎樣改進自動化設備的控制精度,企業追求經濟效益,提升生產效益,是本課題研究的一個重要動力。從什麼角度來改善 PLC模擬控制系統,是技術人員現階段需要攻克的難關。技術人員根據實際需求,增強 PLC在工業生產中的控制,針對溫度等大滯後性系統從軟體和硬體兩個方面進行研討,採用模糊 PID算法、單片機和 CPLD等技術,綜合分析,儘量削減誤差,使控制精度達最佳狀態,並控制生產成本,實現效益的增值。
通常利用以下幾種方法,實現 PLC 對模擬量的 PID 控制。一是使用 PID 過程控制模組。它是廠家提供的配套模組,PID 控制程式已設計好,只需修改參數值,便能直接用於採集模擬量,使用方便,控制方法固定,價格昂貴,適用於大型的控制系統,控制多達幾十路閉環迴路。二是使用PID 功能指令。它比第一種控制方式更加靈活,但對非線性、滯後性的複雜系統無法保證控制效果。同時,它需要配合 PLC 模擬量輸入輸出模組,在程式中,選擇對應的數據暫存器,設定 PID 指令參數表初始化。三是自己編寫 PID控制程式。由於實際生產中,具有非線性、時變性和大滯後性的複雜 PLC 模擬控制系統偏多,故常根據系統的特點,自己編寫 PLC 程式,這種方式也需配合 PLC 模擬量輸入輸出模組,靈活性是這三種方式里最強的,適用於各種複雜 PLC 模擬控制系統,成本偏低,實現效果最佳。儲水池、變頻器、水泵、高壓水箱、帶有冷卻水夾套的熱水鍋爐單元等構成了鍋爐過程控制系統。
對單一的線性系統採用 PID 功能指令控制,但難以滿足具有非線性、時變性和滯後性特點工業生產,為解決這個難題,通常採用模擬控制,它是查德教授在美國加利福尼亞大學提出的,從它誕生到2018年已有四十多年了,對於溫度等大滯後性系統而言,這種算法更先進,控制原理簡單,易於通過編程實現。模糊控制作為智慧型控制分支之一,它的控制策略一般是指人類自然語言表達的知識和規則,再利用模糊集合論、模糊關係、模糊語言和模糊邏輯推理的方式,將控制策略轉化成數字量,這就是模糊控制的基本原理。模糊化、知識庫和解模糊這三部分構成了模糊控制器,它是模糊控制系統的核心,Mamdani 型和 T-S 型是常用兩種模糊控制器。本文以 Mamdani 型模糊控制器為例,解析各部分的特點。模糊化過程是指選擇系統的偏差作為輸入變數,依據實際情況,確定取值範圍,利用量化因子,按比例把輸入變數的精確值變換對應的模糊值,確定模糊子集數量,分別確定歸屬的函式。資料庫和規則庫是組成知識庫的兩部分。為推理機提供數據,是用來存放函式的資料庫。模糊控制規則是用規則庫來存放的。劃分模糊子集越細,規則的數量就越多,對模糊量進行模糊推理和決策,模糊輸出量是利用推理機進行推理算法,這就被稱為模糊推理過程。由於模糊輸出量得出的是模糊集合的形式,解模糊是將由推理得到的模糊輸出量轉化為實際精確的控制量。本文針對溫度、壓力、流量等模擬量,一是輸入量的模糊化程式,利用 MATLAB 模糊工具箱,對鍋爐系統進行模糊推理。二是模糊控制查詢表程式,用離線計算查詢表的方法能增強系統的實時性,在 PLC 的數據暫存器中,依次將模糊控制表按順序存放,得出不同輸入當前時刻的輸出控制量。三是 PID 參數輸出程式,根據實時的 PID整定參數,進行參數運算,輸出參數,有效控制被控量。
