簡介
滑差電機
 滑差電機
滑差電機電磁調速異步電動機又稱滑差電機,它是一種恆轉矩交流無級變速電動機。由於它具有調速範圍廣、速度調節開滑、起動轉矩大、控制功率小、有速度負反饋的自動調節系統時機械特性硬度高等一系列優點,因此在印刷機及騎馬訂書機、無線裝訂高頻烘乾聯動機中都得到廣泛套用。如801型對開立式停迴轉凸版印刷機、JS2101型對開雙面膠印機,J2105型對開單色膠印機、J2108型對開單色膠印機、PZ4880-01A型對開四色膠印機等印刷機械採用這種電動機就更能符合印刷工藝要求。烘版機採用這種電動機調速後,能有效地控制膠膜厚度,操作十分方便。騎馬訂書機採用這種電動機調速,能夠根據書刊的要求相應地調節轉速而提高書刊裝訂質量。
帶有速度負反饋的電磁調速異步電動機的主要缺點是:在空載或輕載(小於10%額定轉矩)時,由於反饋不足,會造成失控現象;在調速時,隨著轉速降低,離合器的輸出功率和效率也相應地按比例下降。所以此電機適用於長期高速運轉和短時間低速運轉。為適應印刷機低速運轉的需要,在採用電磁調速異步電動機作主驅動的印刷機中往往再配裝一台三相異步電動機作為低速電機使用。
工作原理
 採用滑差電機調速的切粒機
採用滑差電機調速的切粒機電磁調速異步電動機是由普通鼠籠式異步電動機、電磁滑差離合器和電氣控制裝置三部分組成。異步
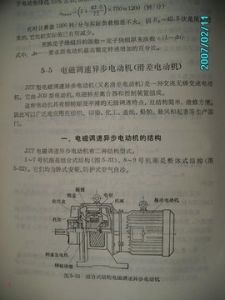
電機作為原動機使用,當它鏇轉時帶動離合器的電樞一起鏇轉,電氣控制裝置是提供滑差離合器勵磁線圈勵磁電流的裝置。這裡主要介紹電磁滑差離合器,圖2-19是其結構示意圖。它包括電樞、磁極和勵磁線圈三部分。電樞為鑄鋼製成的圓筒形結構,它與鼠籠式異步電動機的轉軸相連線,俗稱主動部分;磁極做成爪形結構,裝在負載軸上,俗稱從動部分。主動部分和從動部分在機械上無任何聯繫。當勵磁線圈通過電流時產生磁場,爪形結構便形成很多對磁極。此時若電樞被鼠籠式異步電動機拖著鏇轉,那么它便切割磁場相互作用,產生轉矩,於是從動部分的磁極便跟著主動部分電樞一起鏇轉,前者的轉速低於後者,因為只有當電樞與磁場存在著相對運動時,電樞才能切割磁力線。磁極隨電樞鏇轉的原理與普通異步電動機轉子跟著定子繞組的鏇轉磁場運動的原理沒有本質區別,所不同的是:異步電動機的鏇轉磁場由定子繞組中的三相交流電產生,而電磁滑差離合器的磁場則由勵磁線圈中的直流電流產生,並由於電樞鏇轉才起到鏇轉磁場的作用。
組成結構
1-原動機 2-工作氣隙 3-主軸 4-輸出軸 5-磁極 6-電樞
相關公式
電磁滑差離合器的機械特性可近似地用下列經驗公式表示:
n=n0-KT2/I4f
式中:n0-離合器主動部分(鼠籠電動機)的轉速;
n-離合器從動部分(磁極)的轉速;
If-勵磁電流;
K-與離合器結構有關的係數;
T-離合器的電磁轉矩。
當穩定運行時,負載轉矩與離合器的電磁轉矩相等。由上述公式可知:
(1)當負載一定時,勵磁電流If的大小決定從動部分轉速的高低,勵磁電流愈大,轉速愈高;反之,勵磁電流愈小,轉速就愈低。根據這一特性,可以利用電氣控制電路非常方便地調節從動部分的轉速。
(2)當勵磁電流一定時,從動部分轉速將隨著負載轉矩增加而急劇降低,並且這種下降在弱勵磁電流的情況下更加嚴重,如圖2-20a所示,它具有較軟的機械特性,這種軟的機械特性在許多情況下,不能滿足生產機械的要求。為了獲得範圍較廣,平滑而穩定的的調速特性,通常採用速度負反饋的措施,使電磁滑差離合器具有如圖2-20b所示的硬機械特性。
圖2-21為帶有速度負反饋的電磁調速異步電動機原理框圖。它是利用測速發電機把離合器的輸出速度n換成交流電壓U-,再經整流器變成直流電壓U-。將U-送入比較元件,與給定直流勵磁電壓Uf進行比較。得電壓差△Uf-U-。所以輸入離合器的勵磁電流If不是正比於勵磁電壓Uf,而是正比於電壓△U。由於U~(U-)的大小與轉速n有關,n增大,U~(U-)變大。n減小,U~(U-)變小。因此,在給定直流勵磁電壓Uf有變情況下,輸入的勵磁電流If的大小與轉速n有關,即隨著n的下降或上升,勵磁電流If將自動增加或減小,由於負反饋的作用,提高了電磁離合器機械特性的硬度,這時調速的參數不再是電流If將自動增加或減小,由於負反饋的作用,提高了電磁離合器機械特性的硬度,這時調速的參數不再是電流If而是電壓Uf。顯然,給定勵磁電壓Uf愈高,則轉速n愈高;反之則轉速愈低,如圖2-20b所示。
從圖中可以看出:在空載或輕載(小於10%額定轉矩)時,由於反饋量不足,會造成失控現象,此外,在調速時,隨著轉速降低,離合器的輸出功率和效率也相應地按比例下降。
異步電機起動
該電動機與轉運慣量較大的工作機械之間裝有滑差離合器,起動時可以逐漸增加電流,能很平滑地起動。
 爐排滑差電機調速
爐排滑差電機調速在阻力較大的拖動系統中,例如J2203膠印機,電動機往往不能帶負載直接起動,這時可在起動前先斷開離合器的勵磁電源,使鼠籠電動機先空載起動,然後再接上勵磁電源就可起動了。
異步調速
概述
由電磁調速異步電動機的工作原理知,電磁調速異步電動機的速度調節,可通過調節滑差離合器的勵磁電流來實現。下面介紹兩種調節滑差離合器勵磁電流的電路。
(1)用調壓器調速。在圖2-22中,是用調壓變壓器來改變勵磁電流的整流器電源電壓,以達到調速的目的。在此系統中,沒有速度負反饋,電機的機械特性較軟,一般可用於要求不高的調速差系統中。例如,制銅鋅版使用的無粉腐蝕機,膠印製版的烘版機等。
由於這種控制線路結構簡單,便於維護,所以在印刷機構中仍有實用意義。在圖2-22中,TC是單機調壓變壓器,初級電壓220V,次級電壓為0-250V。整流元件是2CZ型矽二極體,型號的選擇應根據離合勵磁線圈的功率或電流來確定。從電路圖可看出,只要改變調壓變壓器的次級電壓,就能改變整流輸出直流電壓,即改變滑差離合器勵磁電流,這樣就能調節電機的轉速。
(2)速度負反饋電磁調速異步電動機控制電路。廣泛採用具有速度負反饋的滑差離合器的控制裝置,來實現寬範圍無級調速,它比起其它調速電動機來說,
主要優點
具有以下主要優點:
①交流無級調速,機械特性硬度較高;
②結構簡單、工作可靠、維護方便、價格低廉;
③調速範圍大,用在像印刷機這樣的恆轉矩負載時,一般可達10:1,有特殊要求(如輪轉機)時亦可達50:1;
④可調節轉矩。在現代化的聯合輪轉機中,都套用了自動化的紙張拉緊機械,它可以達到隨著捲筒紙直徑的變化,調節離合器的轉矩經保持拉力不變。
組成及原理
下面以ZLK-10型調速裝置為例,說明電磁調速異步電動機的調速線路的組成及其工作原理。
它由給定電壓、速度負反饋、放大器、觸發電路、可控矽(晶閘管)整流等環節組成下面對它的基本環節進行分析。
①給定電壓環節。給定電壓環節起始於變壓器TC副邊5端、6端間的繞組。24V的交流電壓經VD2、整流並經C2、R2、C3濾波和VZ穩壓,得到16V的直流電壓。最後由R5和RP4“定速”檔的轉速。“運轉”、“定速”由中間繼電器KA3控制。
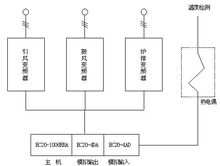
②轉速反饋環節。ZLK-10自動調速系統是採用三相交流測速發電機BR對轉速進行採樣。所得交流經VD8-VD13整流和C8、R13、RP2、RP3濾液後,得到反饋電壓,經過R8傳至放大器的輸入端。由於不同測速發電機靈敏度之間存在差異,所以採用RP2對反饋電壓進行調節。轉速表PV的刻度值依靠RP3調節。電容器C7用於減輕反饋電壓的脈動,有利於調速系統動態穩定性的提高。
③放大器。放大器是以電晶體V2為核心組成。二極體VD4、VD5、VD6用作雙向限幅保護,以避免V2的發射結承受過高的電壓。給定電壓與轉速反饋電壓通過電阻R6、R7和R8進行組合,形成輸入信號,其值正比於上述兩個電壓之差。這個差值經V2放大後可影響V2的集電極電位,對單結電晶體觸發脈衝形成電路進行控制。
④觸發電路。單結電晶體觸發電路的電源是由V1、VD3、R4與變壓器TC的6、7繞組組成。TC的6、7端輸出3V交流電壓,當為負半周期時,V1截止,V1集射極間電壓為16V,如圖2-25b所示;當7.6端輸出為正半周期時,經VD3整流後加到V1的集射極上使V1飽和導通,Vcel=0,放大器與觸發電路不能工作,如圖2-25b所示。
由V3和R11組成的恆流源,再加上電容器C6,能產生鋸齒波用作移相,如圖2-25c所示。其原理是這樣的:設V3和R11恆流源的恆定電源是I0,恆定電流向C6充電,Uc6=1/C6∫t0Iodt,使C6上的電壓上升,當上升到單結管VU的峰值時單結管導通C6放電。放電到VU的谷值時又重新充電。而恆定電流I0的大小又受放大器V2輸出電壓的控制。如當V2的輸入電壓增大,V3的基極電壓就降低,V3更加導通,V3集電極電流I0增大,這樣充放電速度加快,可控矽觸發提前,如圖2-25d所示,導通角增大,導致勵磁電壓增大,如圖2-25e所示;同理V2的輸入電壓減小時,I0減小,導致導通角減小,勵磁電壓減小。可見輸入電壓的大小可以控制可控矽的觸發時刻。
觸發器最終在VU的第一基極通過脈衝變壓器TV輸給晶閘管的控制極。二極體VD7用以短路負脈衝,防止可控矽因控制極出現負脈衝而擊穿。
⑤可控矽整流電路。該系統採用可控矽單相半波整流電路,波形如圖2-25e所示。整流電路的輸出控制轉差離合器的勵磁線圈來產生勵磁電流並最終影響電機的轉速。圖中R1、C1和熱敏電阻RV均對可控矽有過壓保護作用。VD1為續流二極體,其作用是,正半周時由於可控矽導通而使離合器工作;負半周時可控矽不導通,勵磁線圈產生的反向電動勢可經過VD1形成放電迴路,使線圈中的電流連續,從而使離合器工作穩定。
綜合上述,當ZLK-10自動調速系統處於“運轉”狀態,也就是調速狀態時,通過調節電位器RP4改變電壓給定環節的電壓,來改變電動機的轉速。例如調節RP4使給定電壓Uf增大,這時轉速負反饋系統給出的電壓U-保持不變,輸入到V2的電壓△U增加,由V3和11出增大,滑差離合器的勵磁電流增大,最終電動機轉速變快。調速過程如下:
Uf↑→△U↑→Uc充電加快→Ug觸發提前→If↑→n↑
當ZLK-10調速系統置於“定速”狀態,也就是穩速狀態時,通過調速系統可以穩定由於負載RL變化而引的轉速變化。例如當負載變小時,電機轉速將變快,轉速負反饋電路給出的電壓U-將增大,經過R6、R7、R8給出的比較電壓△U將減小,這樣C6充電速度變慢,單機轉速變慢。經過這樣的所饋過程將使電機的轉速基本不變。穩速過程如下:
RL→n↑→U-△U↓→Uc充電變慢→Ug觸發滯後→If↓→n↓
