網路系統
 網路結構1
網路結構1與其他移動通信系統相似,模擬蜂窩移動通信系統也由行動電話交換局(mtso)、基站(BS)和移動台(MS)3大部分組成。其中,行動電話交換局與基站之間通過有線線路連線:基站與移動台之間由無線鏈路通過空中接口相連。
1、行動電話交換局
行動電話交換局用來完成移動用戶與市話用戶之間,或者移動用戶之間通話的自動接續與交換,除了具有程控電話交換功能外,它還具有移動通信特有的一些功能,例如,對移動台的識別和登記、頻道分配、過境切換處理、漫遊和呼叫處理等。因此,行動電話交換局通常由適合移動通信的專用程控交換機組成。但也可以在普通程控交換機上增加一些軟體和硬體,實現控制、接續、交換行動電話的功能,其中硬體是指交換網路、處理器、數據終端等設備;軟體包括系統操作程式(如呼叫處理、接續和控制)、設備狀態測試和維護程式(如路由管理、故障檢測、診斷和處理)、運行管理程式(如話務量統計、記錄和計費)等。
2、基站
 輸入模擬網路
輸入模擬網路基站由射頻部分(射頻架和收發天線)、數據架、線路監測架和維護測試架等幾部分組成。當基站採用120°扇區輻射方式時,需配3個射頻架以及數據架、線路檢測架和維護測試架各1個。每個射頻架最大容量為16個無線信道,即收/發信機各有16台。當基站採用全向天線時,最少需配備4個機架,即射頻架、數據架、線路監測架和維護測試架各1個。
數據架主要包括5個部分:與行動電話交換局數據鏈路相連的數據設備、控制器、建立無線電、定位接收機和話音信道數據接收機,分別完成不同的功能。其中數據設備和控制器有備用設備。線路監測架的主要功能是為行動電話交換局和射頻架提供音頻信號電路接口,並進行線路監測,包括監控單音傳送、接收以及信令編碼。維護測試架的功能是對各種設備狀況進行測試,保持設備良好的運行狀態。
3、移動台
 網路結構2
網路結構2用戶控制單元包括送,受話器、鍵盤、指示燈和蜂鳴器等。與普通的固定電話不同,移動台為了節省無線信道占用時間和避免發生錯撥現象,並不將用戶所撥的號碼逐位立即發出,而是在螢幕上顯不出來並存入暫存器,只有當用戶確認撥號無誤,按下傳送鍵後,被叫號碼才快速發出。一旦接續成功,雙方即可通話。如果沒有成功,顯示屏會顯示相應內容,以便用戶處理。
邏輯單元是移動台的主控部件,主要由單片微處理器組成,用於寬頻數據信令的編/解碼、控制發射機開啟、檢測並轉發監控音等。由測量獲得的各種模擬信號,如信號電平、噪聲電平、發射功率、靜噪檢測結果、壓控振盪器的電壓、頻率合成器鎖相環的工作狀態等,經過A/D(模/數)變換送入單片微處理器處理,處理結果以指令方式送到收,發信機中相關的受控部件,實現移動台類似電腦的智慧型化功能。
收/發信機主要由發射機、接收機和收/發共用的頻率合成器組成。車載台可採用二重空間分集,以減小衰落的影響,即移動台配備兩根天線,其中一根天線收/發合用,另一根只做分集用,採用選擇式開關分集方式。手機則無法分集接收,收/發公用一根天線。
在移動台中,還有話音信號處理電路,主要由瞬時頻偏控制電路、壓縮與擴張電路和加重與去加重電路組成。
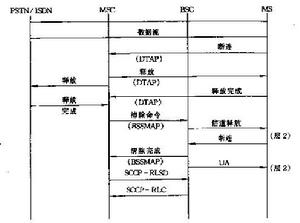
控制信令
輸入
 模擬網路原理
模擬網路原理大容量、全自動的模擬蜂窩移動通信系統,除了要處理移動用戶主呼與被呼之外,還必須不斷監視通話信道質量並進行越區頻道自動切換,同時為漫遊用戶提供服務。所以,系統的控制是比較複雜的。
1、系統的控制結構
輸入模擬蜂窩網系統的控制,涉及公用市話網、行動電話交換局、基站和移動台之間的話音和信令的傳輸與交換。系統既有無線信道,又有有線信道,而且都有話音信道和控制信道之分。
基站既有無線信道,又有有線信道,它在無線網與有線網之間轉接和傳輸信息,其中包括無線網與有線網之間的信令交換。行動電話交換局起控制與協調作用,管理、分配無線信道,協調基站、移動台的工作。它與有線市話網交換的信令採用市話網的標準信令。
2、控制信號及其功能
控制信號主要是監測音和信令音。監測音用於信道分配和對移動用戶通話質量的監測,採用話音帶外的5970、6000和6030Hz這3個單音。監測音還被基站用於確定是否需要進行越區頻道切換。
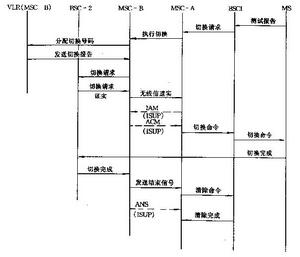
信令音是10kHz的音頻信號,在移動台到基站的反向話音信道中傳輸,主要用在下面兩個過程中:一是當移動台收到基站發來的振鈴信號時,在反向話音信道上向基站傳送信令音,表示振鈴成功,一旦用戶開始通話,就停止傳送;二是移動台在過境切換頻道前,基站在行動電話交換局控制下,在原來的前向話音信道上傳送一個新分配的話音信道指令,移動台收到指令後,傳送信令音確認。系統就是通過這兩個控制信號實現相關控制的。
3、數字信令
輸入蜂窩移動通信系統由於容量很大.所以採用專用控制信道來傳輸數字信令。如前述可知,傳輸信道分為5種:前向和反向話音信道、前向和反向控制信道以及有線信道。不同信道傳輸的數字信令及其格式是不同的。
網路丟包
 模擬網路解調
模擬網路解調檢查路由器的配置,沒有問題。晚上進行故障排除。到現場的終端用:ping192.168.2.14–t連續ping網關,出現一個奇特的現象:大約一分鐘之內,timeout;之後偶兒能ping通,隨著時間的增加,能ping通的次數越來越多,到後來(大約3分鐘)全都ping通,沒有timeout。
用控制口登入路由器,檢查配置檔案,接口狀態、記憶體、路由器負載,一切正常。用showarp,發現所有活躍的終端地址在路由器的arp表中的生存時間一致,都很短(一分鐘左右,大約是終端PING通網關後的時長);是否在沒有PING通之前,路由器沒有存在活動終端的ARP表?若是這樣,表明在不通之時,路由器沒有收到終端的ARP廣播,或者終端根本沒有發ARP請求?
在路由器上debugarp,發現始終三台終端(192.168.2.3)120秒發ARP請求,網關給以回答,另一台長時間沒有發ARP請求。在終端ping通網關之後,業務受理正常,故障沒有出現。
為此進行人工故障重現:切斷路由器與HUB的連線,在路由器上cleararp,debugarp;重啟動所有終端,啟用sniffer進行捕捉,在終端啟動之後,將路由器與hub的連線接上,在終端連續ping網關,timeout,在這期間,sniffer沒有捕捉到數據包,路由器的debug沒有輸出,過一段時間,有幾個包能ping通網關,sniffer捕捉到這幾個包,ARP的debug有輸出。在過一段時間,所有的包都能PING通網關。
該故障重現證明了終端PING不通網關的原因:路由器沒有受到ARP請求。為什麼?根據在終端沒有ping通網關時候,sniffer沒有捕捉到包,對於HUB,終端發的包sniffer應該捕捉到,捕捉不到有:HUB問題、線問題、終端問題。再進行故障重現,用筆記本與自己的連線連線HUB,故障重現;將筆記本直接接在路由器,PING通網關沒有timeout,故障定位在HUB。
故障的可能是HUB的熱穩定性問題,當加電時間長,HUB出現不穩定,故障出現。營業點在更換HUB之後,故障依舊;再次分析sniffer捕捉數據包(ICMP),發現終端向網關正常發ICMP的eoch包,有時網關沒有回覆。既然sniffer與終端、路由器接在同一個HUB上,sniffer能捕捉到終端發的數據包,說明HUB與終端、工作站的連線正常;根據反映,工作站之間的連線是正常的;問題出在哪?
 系統圖
系統圖更換AUI,故障仍存在,再次更換HUB,故障不變;在白天按在晚上故障重現方法進行故障重現,故障不能重現。結合故障發生都在晚上7點前發生,很有規律性,因此判斷最大可能是網路運行環境問題。由於整個營業點設備使用的電源都經過穩壓器進行穩壓後供電,所以對於電源問題一直認為可靠。但是根據這幾天對故障的分析排查,營業點的穩壓器僅對電源進行穩壓,沒有進行浪涌吸收、過濾處理,在晚上7點前,剛好是用電高峰,大量電器的開啟,使電源存在大量尖峰脈衝,會對邏輯門電路造成影響。
基於以上分析判斷,考慮到UPS具有過濾電源與浪涌吸收的能力,增加一台UPS對HUB、路由器進行供電,故障立即消除。該“不可能”的故障表明在住宅區內連線網路,要重視網路運行環境,尤其是電源質量。
陰影效應
 輸入模擬網路
輸入模擬網路如果無線電波在傳播路徑中遇到起伏的地形、建築物和高大的樹木等障礙物時,就會在障礙物的後面形成電波的陰影。接收機在移動過程中通過不同的障礙物和陰影區時,接收天線接收的信號強度會發生變化,造成信號的衰落。
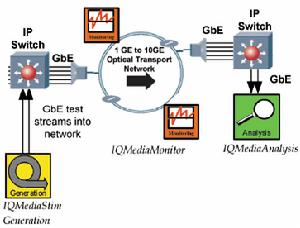
網路測試
 輸入模擬網路
輸入模擬網路經過規範化處理後,訓練樣本的數量大大減少,所以採用批處理法進行網路的訓練。對應每一故障元件的測試數據,只選擇其中的兩個作為樣本數據,一個為元件參數增大方向的數據,另一個為參數減小方向的數據,他們分別對應相應子網路的KCL值大於零(取值為0.5)和小於零(取值為-0.5)兩種情況。子網路正常時,期望輸出為0(容差情況下輸出值介於±0.5之間);子網路故障時輸出為0.5(或-0.5)。訓練時,採用標準BP算法。訓練結束後,對網路進行測試。
測試時選取了85個故障數據,BP網路對其中80個故障診斷正確,5個錯誤,正確率為94%。這裡需要指出的是,利用標準BP神經網路對待測電路的所有可能故障(包括軟故障和硬故障)進行診斷,通過對診斷結果的觀察發現,網路對大部分元件(包括非線性元件)的軟、硬故障的診斷正確率幾乎為100%,誤診斷集中在元件R2,R3故障時導致的子網路1故障。經過分析發現,當R2,R3故障時,子網路1的KCL方程值有成立,因此被誤診斷,重新選擇對R2,R3靈敏度較高的節點作為可及點能改善診斷效果。
