
微機控制電路
微機控制電路的優點 微機只由少數幾片積體電路構成,因此它通常比模擬控制電路體積小,重量輕,而且價格便宜。微機的組件較少,因此也減少了產生故障和出現錯誤的機會,增加了系統的可靠性。微機的控制方案由軟體來實現,因此它除能實現模擬控制系統的比例積分調節器(PID)調節規律外,還能引入各種先進的控制規律,如非線性控制、前饋複合控制、最優控制以及自適應控制等。在少許改變硬體,甚至完全不改變硬體的情況下,只需修改一些程式段或程式數據就能改變各種控制方案以適應不同控制對象,因而控制裝置通用性強,容易實現硬體設備的標準化。微機控制電路屬於數字控制電路,因此它具有增加位數便能提高靜態精度、不易受溫度和電源電壓變化等的影響,即穩定性能高的優點。在採用微機的電力傳動系統中,故障的檢測和保護可以用程式來實現,故可實現故障的自診斷,提高系統可靠性。微機基礎 用微處理器組成的計算機稱為微機(圖1)。
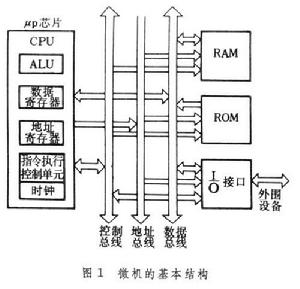 微處理器執行各種計算並具有各種控制功能,它通過一系列指令(稱為軟體程式)的執行來完成一項運算。這些指令儲存在與微處理器連線的存儲器里。其中算術邏輯單元(ALU)是一種處理單元,它執行所有的算術運算和邏輯運算,如加法、減法和位處理等。數據暫存器用於數據的中間處理和存儲,以減少調進存儲器和從存儲器調出數據的數量,它也接受和傳遞CPU的進、出數據。地址暫存器用於儲存存儲器的地址,並與數據暫存器一起把輸入/輸出接口存儲器的數據調進和調出。控制單元則控制和監督指令的正確執行。時鐘或 CPU時基發生器包含在控制單元內。時鐘頻率決定微處理器的基本運算速度。存儲器含有大量的存儲單元,是儲存指令和數據的部件,唯讀存儲器(ROM)中指令被永久性地儲存起來,它們只能被讀出而不能被消除。隨機存儲器(RAM)不僅能讀出信息,而且能寫入(即儲存)信息。數據或可變化的信息儲存在 RAM里,在程式控制下的CPU可按需要讀出或者更改某個RAM存儲單元的存儲信息。輸入/輸出(I/O)接口使得CPU和外界之間能進行通信,這些接口電路在CPU和外圍設備之間傳輸數據。接口電路還能把外部數據變換成便於微機使用的形式。微機是面向匯流排的控制裝置,系統中的各部件之間通過數據匯流排和控制匯流排傳遞信息。
微處理器執行各種計算並具有各種控制功能,它通過一系列指令(稱為軟體程式)的執行來完成一項運算。這些指令儲存在與微處理器連線的存儲器里。其中算術邏輯單元(ALU)是一種處理單元,它執行所有的算術運算和邏輯運算,如加法、減法和位處理等。數據暫存器用於數據的中間處理和存儲,以減少調進存儲器和從存儲器調出數據的數量,它也接受和傳遞CPU的進、出數據。地址暫存器用於儲存存儲器的地址,並與數據暫存器一起把輸入/輸出接口存儲器的數據調進和調出。控制單元則控制和監督指令的正確執行。時鐘或 CPU時基發生器包含在控制單元內。時鐘頻率決定微處理器的基本運算速度。存儲器含有大量的存儲單元,是儲存指令和數據的部件,唯讀存儲器(ROM)中指令被永久性地儲存起來,它們只能被讀出而不能被消除。隨機存儲器(RAM)不僅能讀出信息,而且能寫入(即儲存)信息。數據或可變化的信息儲存在 RAM里,在程式控制下的CPU可按需要讀出或者更改某個RAM存儲單元的存儲信息。輸入/輸出(I/O)接口使得CPU和外界之間能進行通信,這些接口電路在CPU和外圍設備之間傳輸數據。接口電路還能把外部數據變換成便於微機使用的形式。微機是面向匯流排的控制裝置,系統中的各部件之間通過數據匯流排和控制匯流排傳遞信息。 可逆傳動的微機控制 在調速精度要求不高時,可用普通測速發電機將電動機的速度轉變為模擬信號,再用A/D(模擬/數字)變換器將Ufn轉變為數位訊號Dfn(圖2)。
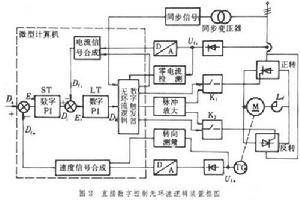 對調速精度要求較高時,可以採用速度編碼器把速度值轉變為電脈衝,電脈衝的頻率與速度成正比,再利用f/D(頻率/數字)變換器把頻率轉變為數字量。速度給定值Dn和速度反饋值Dfn在計算機中進行數字比較,得出數字誤差信號En,然後經過數字比例積分(PI)速度調節器進行數字PI運算,其輸出量即為電流數字給定值。電流反饋信號的取法是,套用常規電流檢測器將負載電流轉變為模擬信號Ufi,再用A/D變換器將Ufi轉變為數字量Dfi,然後在計算機中將給定電流值Di和電流反饋值Dfi進行數字比較,經比較所得的電流數字誤差信號Ei經數字PI電流調節器進行數字PI運算,其輸出即為數字移相信號Dk。經過數字觸發器把數字移相信號Dk轉變為具有適當控制角α 的晶閘管觸發脈衝,和常規觸發器相似。為了保證觸發相位和主電路電流之間的同步關係,必須設定同步電路。同步電路由同步變壓器和同步信號發生器組成。由單板機輸出的信號,經功放電路使觸發脈衝具有足夠強度。仿照模擬邏輯選觸無環流系統的結構,觸發脈衝經過脈衝切換電子開關K1、K2送到晶閘管的控制板上。指揮脈衝切換開關的邏輯功能(相當於模擬系統中的無環流邏輯裝置的功能)是利用軟體通過單板機實現的。
對調速精度要求較高時,可以採用速度編碼器把速度值轉變為電脈衝,電脈衝的頻率與速度成正比,再利用f/D(頻率/數字)變換器把頻率轉變為數字量。速度給定值Dn和速度反饋值Dfn在計算機中進行數字比較,得出數字誤差信號En,然後經過數字比例積分(PI)速度調節器進行數字PI運算,其輸出量即為電流數字給定值。電流反饋信號的取法是,套用常規電流檢測器將負載電流轉變為模擬信號Ufi,再用A/D變換器將Ufi轉變為數字量Dfi,然後在計算機中將給定電流值Di和電流反饋值Dfi進行數字比較,經比較所得的電流數字誤差信號Ei經數字PI電流調節器進行數字PI運算,其輸出即為數字移相信號Dk。經過數字觸發器把數字移相信號Dk轉變為具有適當控制角α 的晶閘管觸發脈衝,和常規觸發器相似。為了保證觸發相位和主電路電流之間的同步關係,必須設定同步電路。同步電路由同步變壓器和同步信號發生器組成。由單板機輸出的信號,經功放電路使觸發脈衝具有足夠強度。仿照模擬邏輯選觸無環流系統的結構,觸發脈衝經過脈衝切換電子開關K1、K2送到晶閘管的控制板上。指揮脈衝切換開關的邏輯功能(相當於模擬系統中的無環流邏輯裝置的功能)是利用軟體通過單板機實現的。 應當指出,A/D變換器是不帶極性的,也就是它的輸入模擬量只能為正,而輸出的數字量也只能表示大小(代表正)。但在可逆調速系統中,由於測速發電機(SF)得到的速度反饋信號Ufn可能為正,也可能為負,為了適應A/D變換器的要求,這個信號應經過整流變為永遠為正的信號。這個只表示速度大小的模擬信號經過A/D變換後,轉變為只表示速度大小的數字量。為了使這個數字量能表示轉速的方向,再從Ufn處取一個信號,作用到單板機內,使Dfn帶上極性符號。Dfi、DK的極性變換是由計算機用軟體來實現的。由上可知,在這個系統中速度設定、速度比較、速度PI調節、電流比較、電流PI調節、觸發相位α 的控制、觸發脈衝的分配以及無環流邏輯功能都是利用軟體通過單板機實現的。
數字PI調節器 在典型的雙環晶閘管直流調速系統中,速度和電流均採用比例積分(PI)調節器。由於在工程上對於連續系統的綜合已有成熟的經驗,所以設計離散系統的最簡單方法是根據連續系統的設計方法,例如頻率法、根軌跡法或其他簡化後的工程設計方法,求出速度調節器和電流調節器的參數,從而得出調節器的傳遞函式。然後,根據傳遞函式寫出調節器動態性能的時域表示法。再將此連續時域表達式離散化,求出相應的差分方程,作為數字調節器程式設計的基礎。
參考書目
張明達主編:《電力拖動自動控制系統》,冶金工業出版社,北京,1983。
