
模型參考適應控制系統
正文
包含有理想系統模型並能以模型的工作狀態為標準自行調整參數的適應控制系統,簡稱模型參考系統。這種適應控制系統已有較成熟的分析綜合理論和方法。模型參考適應控制系統最初是為設計飛機自動駕駛儀而提出的,初期階段由於技術上的困難而未能得到廣泛套用。隨著微型計算機技術的發展,這種系統的實現已較容易。模型參考適應控制技術已在飛機自動駕駛儀、艦船自動駕駛系統、光電跟蹤望遠鏡隨動系統、可控矽調速系統和機械手控制系統等方面得到套用。結構和工作原理
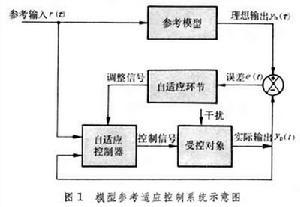 圖1是說明模型參考適應控制系統組成結構和工作原理的示意圖。其中,參考模型是一個具有固定結構和恆定參數的理想系統。在系統的參考輸入作用下,模型的輸出被規定為系統的受控對象所應具有的理想輸出。由於外界干擾和內部的隨機變化(參數漂移等),受控對象的實際輸出與理想輸出之間會出現誤差e(t)。自適應環節根據誤差信號,按照事先設計的調整策略(自適應律)向自適應控制器發出調整信號。控制器根據參考輸入信號r(t)、受控對象實際輸出的反饋信號和調整信號,對受控對象發出相應的控制信號,使誤差e(t)減小以至消失,也就是使受控對象的輸出接近於理想狀態。
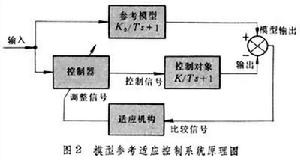
圖1是說明模型參考適應控制系統組成結構和工作原理的示意圖。其中,參考模型是一個具有固定結構和恆定參數的理想系統。在系統的參考輸入作用下,模型的輸出被規定為系統的受控對象所應具有的理想輸出。由於外界干擾和內部的隨機變化(參數漂移等),受控對象的實際輸出與理想輸出之間會出現誤差e(t)。自適應環節根據誤差信號,按照事先設計的調整策略(自適應律)向自適應控制器發出調整信號。控制器根據參考輸入信號r(t)、受控對象實際輸出的反饋信號和調整信號,對受控對象發出相應的控制信號,使誤差e(t)減小以至消失,也就是使受控對象的輸出接近於理想狀態。 設計問題 在模型參考適應控制系統中,自適應環節常是非線性的。如果設計不當,可能使整個系統失去穩定(見穩定性)。自適應律的合理設計是模型參考系統設計中的核心問題。為使系統穩定工作,可採用李雅普諾夫直接法(見李雅普諾夫穩定性理論)或波波夫超穩定性理論的概念和方法來設計自適應律。在圖2 的系統中,受控對象是一個一階系統,它的傳遞函式為K/(Ts+1)。其中K為未知參數,是需要自適應調整的增益,T是已知常數。參考模型的傳遞函式是K0/(Ts+1), K0是理想增益。對於這個系統,適應控制器是一個增益可調的放大器。它是按照李雅普諾夫方法來設計的,其中取李雅普諾夫函式V(e,x)=e2+λx2,λ≥0,x=K0- KS,KS是實際的系統增益。按照圖2的結構組成的適應控制系統可穩定地工作,且可使輸出偏差e(t)趨於零。
 模型參考適應控制系統
模型參考適應控制系統參考書目
Y.D.Landau, Adaptive Control: The Model Reference Approach, Marcel Dekker Inc., New York,1979.
