
李雅普諾夫穩定性理論
中間出現一些化學符號是怎么回事兒?
正文
俄國數學家和力學家A.M.李雅普諾夫在1892年所創立的用於分析系統穩定性的理論。對於控制系統,穩定性是需要研究的一個基本問題。在研究線性定常系統時,已有許多判據如代數穩定判據、奈奎斯特穩定判據等可用來判定系統的穩定性。李雅普諾夫穩定性理論能同時適用於分析線性系統和非線性系統、定常系統和時變系統的穩定性,是更為一般的穩定性分析方法。李雅普諾夫穩定性理論主要指李雅普諾夫第二方法,又稱李雅普諾夫直接法。李雅普諾夫第二方法可用於任意階的系統,運用這一方法可以不必求解系統狀態方程而直接判定穩定性。對非線性系統和時變系統,狀態方程的求解常常是很困難的,因此李雅普諾夫第二方法就顯示出很大的優越性。與第二方法相對應的是李雅普諾夫第一方法,又稱李雅普諾夫間接法,它是通過研究非線性系統的線性化狀態方程的特徵值的分布來判定系統穩定性的。第一方法的影響遠不及第二方法。在現代控制理論中,李雅普諾夫第二方法是研究穩定性的主要方法,既是研究控制系統理論問題的一種基本工具,又是分析具體控制系統穩定性的一種常用方法。李雅普諾夫第二方法的局限性,是運用時需要有相當的經驗和技巧,而且所給出的結論只是系統為穩定或不穩定的充分條件;但在用其他方法無效時,這種方法還能解決一些非線性系統的穩定性問題。發展概況 從19世紀末以來,李雅普諾夫穩定性理論一直指導著關於穩定性的研究和套用。不少學者遵循李雅普諾夫所開闢的研究路線對第二方法作了一些新的發展。一方面,李雅普諾夫第二方法被推廣到研究一般系統的穩定性。例如,1957年,В.И.祖博夫將李雅普諾夫方法用於研究度量空間中不變集合的穩定性。隨後,J.P.拉薩爾等又對各種形式抽象系統的李雅普諾夫穩定性進行了研究。在這些研究中,系統的描述不限於微分方程或差分方程,運動平衡狀態已採用不變集合表示,李雅普諾夫函式是在更一般意義下定義的。1967年,D.布肖對表征在集合與映射水平上的系統建立了李雅普諾夫第二方法。這時,李雅普諾夫函式已不在實數域上取值,而是在有序定義的半格上取值。另一方面,李雅普諾夫第二方法被用於研究大系統或多級系統的穩定性。此時,李雅普諾夫函式被推廣為向量形式,稱為向量李雅普諾夫函式。用這種方法可建立大系統穩定性的充分條件。
系統的受擾運動和平衡狀態 穩定性問題的實質是考察系統由初始狀態擾動引起的受擾運動能否趨近或返回到原平衡狀態。用x0表示初始狀態擾動,則受擾運動就是系統狀態方程 凧=f(x,t)在初始時刻 t0時受到狀態擾動x(t0)=x0後的解。其中x是n維狀態向量,
 f(x,t)是以x和時間t為自變數的一個n維非線性向量函式。在滿足一定條件時,這個狀態方程有惟一解。系統的受擾運動是隨時間 t而變化的,而其變化又與初始擾動 x0和作用時刻t0有直接的關係,數學上表示為依賴於這些量的一個向量函式,記為φ(t; x0,t0)。在以狀態x的分量為坐標軸構成的狀態空間中,隨著時間t增加,受擾運動φ(t; x0,t0)表現為從 x0點出發的一條軌線。平衡狀態是系統處於相對靜止時的運動狀態,用xe表示,其特點是對時間的導數恆等於零,可由求解函式方程f(xe,t)=0來定出。為便於表示和分析,常把平衡點xe規定為狀態空間的原點,這可通過適當的坐標變換來實現。因此李雅普諾夫第二方法可歸結為研究受擾運動軌線相對於狀態空間原點的穩定性。
f(x,t)是以x和時間t為自變數的一個n維非線性向量函式。在滿足一定條件時,這個狀態方程有惟一解。系統的受擾運動是隨時間 t而變化的,而其變化又與初始擾動 x0和作用時刻t0有直接的關係,數學上表示為依賴於這些量的一個向量函式,記為φ(t; x0,t0)。在以狀態x的分量為坐標軸構成的狀態空間中,隨著時間t增加,受擾運動φ(t; x0,t0)表現為從 x0點出發的一條軌線。平衡狀態是系統處於相對靜止時的運動狀態,用xe表示,其特點是對時間的導數恆等於零,可由求解函式方程f(xe,t)=0來定出。為便於表示和分析,常把平衡點xe規定為狀態空間的原點,這可通過適當的坐標變換來實現。因此李雅普諾夫第二方法可歸結為研究受擾運動軌線相對於狀態空間原點的穩定性。 李雅普諾夫意義下的穩定性 指對系統平衡狀態為穩定或不穩定所規定的標準。主要涉及穩定、漸近穩定、大範圍漸近穩定和不穩定。
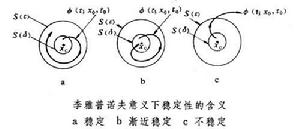
①穩定 用 S(ε)表示狀態空間中以原點為球心以ε為半徑的一個球域,S(δ)表示另一個半徑為 δ的球域。如果對於任意選定的每一個域S(ε),必然存在相應的一個域S(δ),其中δ<ε,使得在所考慮的整個時間區間內,從域 S(δ)內任一點 x0齣發的受擾運動φ(t;x0,t0)的軌線都不越出域S(ε),那么稱原點平衡狀態 xe=0是李雅普諾夫意義下穩定的。這個定義可用數學語言敘述如下:如果對於任意給定的實數ε>0,都存在實數δ(ε,t0),滿足不等式ε>δ(ε,t0)>0,它使從滿足不等式

 的任一初態 x0齣發的運動對於t≥t0滿足不等式
的任一初態 x0齣發的運動對於t≥t0滿足不等式  則稱狀態空間的原點xe=0是李雅普諾夫意義下穩定的。其中,δ的大小不僅與給定的ε值有關,而且也與初始時刻t0有關。當定義中δ值的選取和初始時刻 t0無關時,稱xe=0是一致穩定的。對定常系統,穩定等同於一致穩定。
則稱狀態空間的原點xe=0是李雅普諾夫意義下穩定的。其中,δ的大小不僅與給定的ε值有關,而且也與初始時刻t0有關。當定義中δ值的選取和初始時刻 t0無關時,稱xe=0是一致穩定的。對定常系統,穩定等同於一致穩定。 ②漸近穩定 如果原點平衡狀態是李雅普諾夫意義下穩定的,而且在時間t趨於無窮大時受擾運動φ(t;x0,t0)收斂到平衡狀態xe=0,則稱系統平衡狀態是漸近穩定的。從實用觀點看,漸近穩定比穩定重要。在套用中,確定漸近穩定性的最大範圍是十分必要的,它能決定受擾運動為漸近穩定前提下初始擾動x0的最大允許範圍。
③大範圍漸近穩定 又稱全局漸近穩定,是指當狀態空間中的一切非零點取為初始擾動x0時,受擾運動φ(t;x0,t0)都為漸近穩定的一種情況。在控制工程中總是希望系統具有大範圍漸近穩定的特性。系統為全局漸近穩定的必要條件是它在狀態空間中只有一個平衡狀態。
④不穩定 如果存在一個選定的球域S(ε),不管把域S(δ)的半逕取得多么小,在S(δ)內總存在至少一個點x0,使由這一狀態出發的受擾運動軌線脫離域 S(ε),則稱系統原點平衡狀態xe=0是不穩定的。
當狀態空間為二維平面時,系統平衡狀態xe的穩定、漸近穩定、不穩定的含義,可用圖表示。
 李雅普諾夫穩定性理論
李雅普諾夫穩定性理論 的符號特徵的分析,可判斷平衡狀態為穩定、漸近穩定或不穩定。這樣做比通過求狀態方程的解來判斷容易得多。對於簡單非線性系統,李雅普諾夫函式常可取為x的一個二次型函式V(x)=xTQx,其中xT為x的轉置,Q為正定對稱矩陣。不過,對於複雜的系統,尋找李雅普諾夫函式可能十分困難。
的符號特徵的分析,可判斷平衡狀態為穩定、漸近穩定或不穩定。這樣做比通過求狀態方程的解來判斷容易得多。對於簡單非線性系統,李雅普諾夫函式常可取為x的一個二次型函式V(x)=xTQx,其中xT為x的轉置,Q為正定對稱矩陣。不過,對於複雜的系統,尋找李雅普諾夫函式可能十分困難。 李雅普諾夫穩定性定理 李雅普諾夫第二方法有三個主要定理。
①一致漸近穩定定理 對於由狀態方程
 描述的系統,如果存在一個李雅普諾夫函式V(x,t),它滿足條件:V(x,t)為正定且有無窮小上界,並且為負定,那么原點平衡狀態xe=0是一致漸近穩定的。在很多情況下常常不易找到滿足為負定條件的李雅普諾夫函式。對於這種情況,定理中為負定的條件,可等價地放寬:為半負定,且沿任一受擾運動軌線
描述的系統,如果存在一個李雅普諾夫函式V(x,t),它滿足條件:V(x,t)為正定且有無窮小上界,並且為負定,那么原點平衡狀態xe=0是一致漸近穩定的。在很多情況下常常不易找到滿足為負定條件的李雅普諾夫函式。對於這種情況,定理中為負定的條件,可等價地放寬:為半負定,且沿任一受擾運動軌線 不恆為零。
不恆為零。 ②大範圍一致漸近穩定定理 如果系統的平衡狀態xe=0為一致漸近穩定,並且李雅普諾夫函式V(x,t)隨
 而趨向無窮大,其中x1,…,xn為狀態x的分量,那么原點平衡狀態為大範圍一致漸近穩定。
而趨向無窮大,其中x1,…,xn為狀態x的分量,那么原點平衡狀態為大範圍一致漸近穩定。 ③不穩定定理 如果對xe=0,可從狀態方程
描述的系統找到一個標量函式W(x,t),使成立W(0,t)=0,且在滿足W(x,t)≥0的區域內 為正定,那么原點平衡狀態是不穩定的。
為正定,那么原點平衡狀態是不穩定的。 李雅普諾夫第二方法定理的局限性是它們只給出了判斷平衡狀態穩定性和不穩定性的充分條件。當找不到一個李雅普諾夫函式可用來證明平衡狀態是漸近穩定或不穩定時,並不能對系統穩定性的情況作出結論。
線性定常系統的李雅普諾夫穩定判據 對於由狀態方程
 描述的連續線性定常系統,其中A是n×n常量矩陣,則原點平衡狀態xe=0是大範圍漸近穩定的充分必要條件為:對給定任一正定實對稱矩陣Q,李雅普諾夫方程PA+ATP=-Q有惟一正定實對稱矩陣解P。其中AT是A的轉置矩陣,而且V(x)=xTPx是系統的一個李雅普諾夫函式。對於由狀態方程x(k+1)=Gx(k)所描述的離散線性定常系統,其中G為n×n常量矩陣,k=0,1,…,那么其原點平衡狀態是大範圍漸近穩定的充分必要條件為:對給定任一正定實對稱矩陣Q,離散李雅普諾夫方程GTPG-P=-Q有惟一正定實對稱矩陣解P。在最優控制理論中,李雅普諾夫穩定判據是分析線性調節器穩定性的基本方法。在將判據用於分析具體問題時,常採用數值方法求解李雅普諾夫方程,並已配有專門的算法程式。
描述的連續線性定常系統,其中A是n×n常量矩陣,則原點平衡狀態xe=0是大範圍漸近穩定的充分必要條件為:對給定任一正定實對稱矩陣Q,李雅普諾夫方程PA+ATP=-Q有惟一正定實對稱矩陣解P。其中AT是A的轉置矩陣,而且V(x)=xTPx是系統的一個李雅普諾夫函式。對於由狀態方程x(k+1)=Gx(k)所描述的離散線性定常系統,其中G為n×n常量矩陣,k=0,1,…,那么其原點平衡狀態是大範圍漸近穩定的充分必要條件為:對給定任一正定實對稱矩陣Q,離散李雅普諾夫方程GTPG-P=-Q有惟一正定實對稱矩陣解P。在最優控制理論中,李雅普諾夫穩定判據是分析線性調節器穩定性的基本方法。在將判據用於分析具體問題時,常採用數值方法求解李雅普諾夫方程,並已配有專門的算法程式。 李雅普諾夫第二方法用於估計瞬態回響快速性 對於用李雅普諾夫第二方法判斷為漸近穩定的系統,由李雅普諾夫函式還可得到系統瞬態回響快速性的一種估計。
 表示正定的V(x,t)和負定的
表示正定的V(x,t)和負定的 的比值,必為正值。再取ηmin表示η的最小值,那么由關係式V(x,t)≤V(x0,t0)exp(-ηmin(t-t0))可得出李雅普諾夫函式衰減快慢的一種估計,其中V(x0,t0)為初始時刻t0和初始狀態x0時的函式值。V(x,t)可展開為以x2項為首項的一級數,所以ηmin也可作為估計瞬態回響衰減快慢的一個指標,較小的ηmin值對應於較快的瞬態回響。對非線性系統,只有當V(x,t)形式比較簡單時,ηmin的值才可容易確定。對線性定常系統,ηmin等於矩陣QP-1的特徵值,一般很容易決定,其中P-1是李雅普諾夫方程解矩陣P 的逆矩陣。
的比值,必為正值。再取ηmin表示η的最小值,那么由關係式V(x,t)≤V(x0,t0)exp(-ηmin(t-t0))可得出李雅普諾夫函式衰減快慢的一種估計,其中V(x0,t0)為初始時刻t0和初始狀態x0時的函式值。V(x,t)可展開為以x2項為首項的一級數,所以ηmin也可作為估計瞬態回響衰減快慢的一個指標,較小的ηmin值對應於較快的瞬態回響。對非線性系統,只有當V(x,t)形式比較簡單時,ηmin的值才可容易確定。對線性定常系統,ηmin等於矩陣QP-1的特徵值,一般很容易決定,其中P-1是李雅普諾夫方程解矩陣P 的逆矩陣。 參考書目
N.Rouche,P.Habets,M.Laloy, Stability Theory by Liapunov's Direct Method, Springer-Verlag, New York, 1979.
