
方法介紹
 極坐標法
極坐標法不等同於笛卡爾直角坐標系中採用兩個正交軸的垂直投影進行定位(x,y),極坐標沒有X、Y軸,,坐標中某點表示為 D<DEGREE(即距離<角度),這裡角度方向,以水平線為0°或360°(即時鐘的3:00時針方向),逆時針方向為正方向。如100<-30,即在順時針30°(時鐘的4點時針方向),距離原點100個單位的點。
幾何意義
用極坐標解決幾何問題的方法。在直角坐標系中(x,y),x被ρcosθ代替,y被ρsinθ代替,ρ=(x^2+y^2)^0.5,從而得到新的方程。這樣的方程常常用來解決曲線問題,如橢圓曲線、紐線、螺線等等,可以使解題更加清晰簡便。
設曲線C的極坐標方程為 r=r(θ)。
則C的參數方程為 { x=r(θ)cosθ
y=r(θ)sinθ
其中 θ為極角。
 極坐標法
極坐標法由參數方程求導法,得曲線C的切線對x軸的斜率為 yˊ=rˊ(θ)sinθ+r(θ)cosθ∕rˊ(θ)cosθ-r(θ)sinθ=rˊtanθ+r∕rˊ-rtanθ
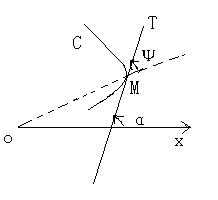
設曲線C在點M( r,θ)處的極半徑OM與切線MT間的夾角為 Ψ,則 Ψ=α-θ(如圖)
故有 tanΨ=tan(α-θ)= yˊ-tanθ∕1+yˊtanθ
將 yˊ代入,化簡得 tanΨ=r(θ) ∕rˊ(θ)
這一重要公式表明:在極坐標系下,曲線的極半徑 r(θ)與其導數 rˊ(θ)之比等於極半徑與曲線切線之夾角的正切。
方程
用極坐標系描述的曲線方程稱作極坐標方程,通常表示為r為自變數θ的函式。
極坐標方程經常會表現出不同的對稱形式,如果r(−θ) = r(θ),則曲線關於極點(0°/180°)對稱,如果r(π-θ) = r(θ),則曲線關於極點(90°/270°)對稱,如果r(θ−α) = r(θ),則曲線相當於從極點逆時針方向鏇轉α°。
圓
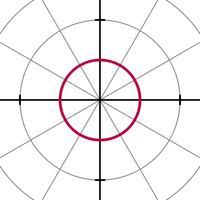 方程為r(θ)=1的圓
方程為r(θ)=1的圓在極坐標系中,圓心在(a, φ) 半徑為 R的圓的方程為:r^2 + a^2- 2*r*a*cos(θ - φ) = R^2
該方程可簡化為不同的方法,以符合不同的特定情況,比如方程r=a表示一個以極點為中心半徑為a的圓。
直線
經過極點的射線由如下方程表示 :
θ = φ,
其中φ為射線的傾斜角度,若 m為直角坐標系的射線的斜率,則有φ = arctan m。 任何不經過極點的直線都會與某條射線垂直。 這些在點(r0, φ)處的直線與射線θ = φ 垂直,其方程為r(θ) = r_0*sec(θ - φ)。
玫瑰線
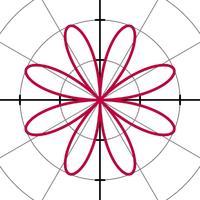 方程為 r(θ) = 2 sin 4θ的玫瑰線
方程為 r(θ) = 2 sin 4θ的玫瑰線極坐標的玫瑰線(polar rose)是數學曲線中非常著名的曲線,看上去像花瓣,它只能用極坐標方程來描述,方程如下:
r(θ) = a*cos kθ 或
r(θ) = a sin kθ,
如果k是整數,當k是奇數時那么曲線將會是k個花瓣,當k是偶數時曲線將是2k個花瓣。如果k為非整數,將產生圓盤(disc)狀圖形,且花瓣數也為非整數。注意:該方程不可能產生4的倍數加2(如2,6,10……)個花瓣。變數a代表玫瑰線花瓣的長度。
阿基米德螺線
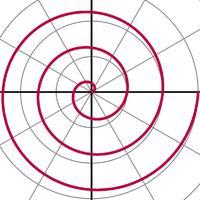 一條阿基米德螺線
一條阿基米德螺線右圖為方程 r(θ)= θ for 0 < θ < 6π的一條阿基米德螺線。
阿基米德螺線在極坐標里使用以下方程表示:r(θ) = a+bθ,
改變參數a將改變螺線形狀,b控制螺線間距離,通常其為常量。阿基米德螺線有兩條螺線,一條θ > 0,另一條θ < 0。兩條螺線在極點處平滑地連線。把其中一條翻轉 90°/270°得到其鏡像,就是另一條螺線。
圓錐曲線
圓錐曲線方程如下:
r = l / (1 + e*cosθ)
其中l表示半徑,e表示離心率。 如果e < 1,曲線為橢圓,如果e = 1,曲線為拋物線,如果e > 1,則表示雙曲線。
或者r= e* p/ (1 + e*cosθ)
其中 e表示離心率, p表示焦點到準線的距離。
其他曲線
由於坐標系統是基於圓環的,所以許多有關曲線的方程,極坐標要比直角坐標系(笛卡爾形式)簡單得多。比如雙紐線,心臟線。
套用
行星運動的克卜勒定律
極坐標提供了一個表達開普拉行星運行定律的自然數的方法。
1.克卜勒第一定律:認為環繞一顆恆星運行的行星軌道形成了一個橢圓,這個橢圓的一個焦點在質心上。上面所給出的二次曲線部分的等式可用於表達這個橢圓。
2.克卜勒第二定律,即等域定律:認為連線行星和它所環繞的恆星的線在等時間間隔所劃出的區域是面積相等的,即ΔA/Δt是常量。這些等式可由牛頓運動定律推得。在克卜勒行星運動定律中有相關運用極坐標的詳細推導。
極坐標法測定界址點
 極坐標法
極坐標法已知點A上安置在經緯儀等儀器,後視另一已知點B定向,然後觀測至各界址點的方向,從而可算得各方向與後視方向的夾角ß,用測距儀測量測站點至各界址點的距離D。
圖2極坐標法測定界址點
採用極坐標法測量時,界址點坐標可按下式計算:
其中:Xi 、Yi——待測界址點坐標
XA、YA——測站點已知坐標
D——測站點至待測界址點距離
α0——已知方位角
βi——觀測角
其它介紹
直角坐標
互相垂直,並且有公共原點的數軸。其中橫軸為X軸,縱軸為Y軸。這樣我們就說在平面上建立了平面直角坐標系,簡稱直角坐標系
球坐標是三維坐標系的一種,用以確定三維空間中點、線、面以及體的位置,它以坐標原點為參考點,由方位角、仰角和距離構成。
柱坐標系
柱坐標系中的三個坐標變數是 r、φ、z。與直角坐標系相同,柱坐標系中也有一個z變數。各變數的變化範圍是:
r∈[0,+∞), φ∈[0, 2π], z∈R 其中 x=rcosφ y=rsinφ z=z
