
定義
如下圖所示,已知 A、B、C 三點的坐標,通過測量三個角度 α、β、γ 即可求出這三個角度頂點 P 的坐標。此即為後方交會。
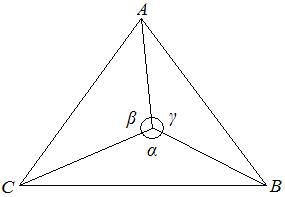 後方交會示意圖
後方交會示意圖計算公式一
計算公式如下圖所示
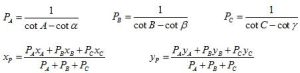 計算公式一(一)
計算公式一(一)實際測量時一般是使用全站儀測量三個方向角PA、PB、PC。根據這三個方向角計算如下六個變數,然後再代入上面的公式計算點P的坐標。
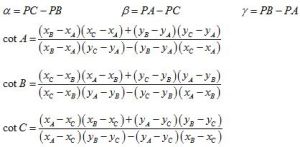 計算公式一(二)
計算公式一(二)計算公式二
全站儀測量三個方向角PA、PB、PC。根據這三個方向角計算點 P 坐標的公式如下:
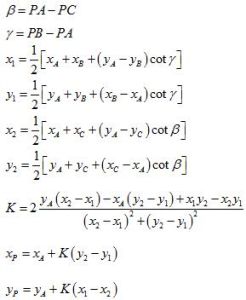 計算公式二
計算公式二危險圓
點 P 在三角形ABC的外接圓上時,α、β、γ將保持不變。如此一來,點P的坐標將有無窮個——外接圓上的任意一點均可以是點 P。此時,使用計算公式計算點 P 坐標時,可能會因為除以零而得到無效解。因此,稱三角形 ABC 的外接圓為危險圓。
點 P 靠近外接圓時,很小的觀測誤差都會引起點 P 位置的較大偏差。為此,後方交會時,應避免點P離危險圓很近。
精度
 定位精度與定向精度
定位精度與定向精度