
原理
任何一個沒有受約束的物體,在空間均具有6個獨立的運動。
 六自由度
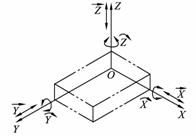
六自由度以如圖所示的長方形為例,它在直角坐標系oxyz中可以有3個平移運動和3個轉動。3個平移運動分別是沿x,y,z軸的平移運動,3個轉動分別是繞x,y,z軸的轉動。習慣上把上述6個獨立運動稱做6個自由度。
 六自由度
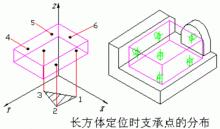
六自由度如果採取一定的約束措施,消除物體的6個自由度,則物體被完全定位。如圖所示,採用6個按一定規則設定的支撐點,約束物體6個自由度的原理稱為六點定位原理。
套用
六自由度機器人
六自由度工業機器人是典型的機電一體化產品,其動作靈活性高,工作空間範圍大,可以很靈活的繞過障礙物,並且結構緊湊,占地面積也比較小,關節上相對運動部件容易密封防塵,廣泛套用在工具機上下料、取件、弧焊、噴漆等行業,但對其實物進行研究和開發存在成本高、周期長等缺點。而針對教學和研究的需要,對六自由度工業機器人結構、運動和控制系統的認知理解和研究,要求機器人能完成相關六個自由度的運動,且要結構簡單,操縱安全,成本低,一般不會造成事故。為此開發一種六自由度機器人來滿足這些研究和教學的要求是很有必要的。
六自由度運動平台
六自由度運動平台是由六支作動筒,上、下各六隻萬向鉸鏈和上、下兩個平台組成,下平台固定在基礎上,藉助六支作動筒的伸縮運動,完成上平台在空間六個自由度(X,Y,Z,α,β,γ)的運動,從而可以模擬出各種空間運動姿態。可廣泛套用到各種訓練模擬器如飛行模擬器、艦艇模擬器、海軍直升機起降模擬平台、坦克模擬器、汽車駕駛模擬器、火車駕駛模擬器、地震模擬器以及動感電影、娛樂設備等領域,甚至可用到空間宇宙飛船的對接,空中加油機的加油對接中。在加工業可製成六軸聯動工具機、靈巧機器人等。由於六自由度運動平台的研製,涉及機械、液壓、電氣、控制、計算機、感測器,空間運動數學模型、實時信號傳輸處理、圖形顯示、動態仿真等等一系列高科技領域,因而六自由度運動平台的研製變成了高等院校、研究院所在液壓和控制領域水平的標誌性象徵。
