
飛機
介紹
 全姿態角
全姿態角 全姿態角
全姿態角 全姿態角
全姿態角 全姿態角 全姿態角 全姿態角
全姿態角 全姿態角 全姿態角機體坐標系 ,對於飛機而言,如圖所示, 軸沿飛機橫軸指右, 軸沿飛機縱軸指前, 軸沿飛機豎軸並與 、 軸構成右手直角坐標系。
 地理坐標系
地理坐標系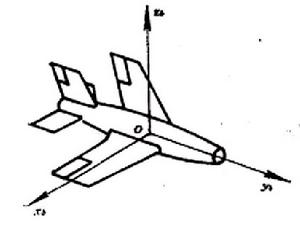 機體坐標系
機體坐標系 全姿態角
全姿態角 全姿態角
全姿態角 全姿態角
全姿態角 全姿態角 全姿態角 全姿態角
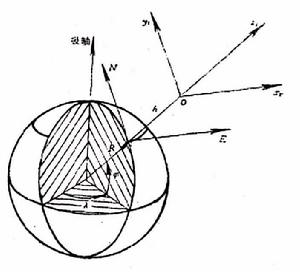
全姿態角 全姿態角 全姿態角地理坐標系 如右圖所示,其原點位於運載體所在的點, 軸沿當地緯線指東, 軸沿當地子午線指北, 軸沿當地地理垂線指上並與 、 軸構成右手直角坐標系。
 全姿態角 全姿態角
全姿態角 全姿態角 全姿態角
全姿態角 全姿態角 全姿態角 全姿態角
全姿態角 全姿態角 全姿態角 全姿態角 全姿態角 全姿態角
全姿態角 全姿態角 全姿態角飛機姿態角是由機體坐標系與地理坐標系之間的關係確定的,由航向角、俯仰角和橫滾角三個歐拉角組成。其中,俯仰角 為機體 軸與地平面(平面 )間的夾角,以飛機抬頭為正;航向角 為機體 軸在地平面上的投影與 軸間的夾角,以機頭右偏航為正;橫滾角 為機體 軸與包含機體 軸的鉛垂面間的夾角,以飛機向右傾斜為正。
全姿態角 全姿態角 全姿態角
全姿態角 全姿態角
全姿態角 全姿態角 全姿態角 全姿態角 全姿態角
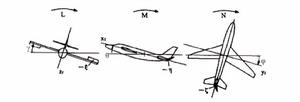
全姿態角 全姿態角 全姿態角 全姿態角按照轉動順序來定義,如圖所示,假設初始時機體坐標系 與地理坐標系 對應各軸重合。機體坐標系按圖中所示的三個角速度 、 和 依次相對地理坐標系轉動,這樣所得的三個角度 、 和 就分別是飛機的航向角、俯仰角和橫滾角。
控制
 全姿態角
全姿態角飛機主要藉助機翼和平尾上的舵面來實施操縱。通過副翼、升降舵和方向舵(ξ,η,ζ),可以產生繞縱軸、橫軸和豎軸(x,y,z)的力矩(L,M,N),藉助這些力矩,就可以改變飛機姿態角( )。
 全姿態角 全姿態角
全姿態角 全姿態角圖中的 分別為滾轉角、俯仰角和航向角。
衛星
介紹
 全姿態角
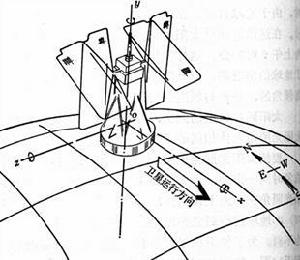
全姿態角定義衛星質心為坐標原點,沿軌道前進的切線方向為 x 軸,垂直軌道面的方向為 y 軸,垂直 xy 平面的為 z 軸,則衛星的姿態有三種情況:繞 x 軸旋轉的姿態角,稱滾動;繞 y 軸旋轉的姿態角,稱俯仰;繞 z 軸旋轉的姿態角,稱航偏。
衛星姿態角的確定是對衛星進行姿態控制的基礎,利用陀螺和紅外敏感器互補的特性,並對測量所得到的數據進行處理,便可得到衛星姿態角的估計值。
控制
測定衛星姿態角主要用以控制衛星姿態,多採取三軸穩定方式。三軸穩定方式是對衛星相互垂直的三個軸都進行控制,不允許任何一個軸產生超出規定值的轉動和擺動。實現衛星三軸姿態控制的系統一般包括姿態敏感器、姿態控制器和姿態執行機構三部分。姿態敏感器有慣性敏感器、地球敏感器、太陽敏感器、星敏感器等,用於察覺和測量衛星的姿態角變化,即衛星沿各個軸的轉動角度及轉動角速度有多大,是否超出規定的範圍。
姿態控制器用於把姿態敏感器送來的衛星姿態角變化值的信號,經過一系列比較、處理,產生控制信號輸送到姿態執行機構。姿態執行機構則根據姿態控制器送來的控制信號產生力矩,使衛星姿態恢復到正確的位置,常用的執行機構有反作用飛輪和推力器。當衛星的姿態處於所要求的姿態時,飛輪保持勻速旋轉;如果衛星偏離了某一位置,飛輪加速或減速,產生一個相反方向的力矩,使衛星回復到所要求的姿態位置。衛星三個軸向各設定一個這樣的飛輪,就能控制衛星三個軸方向的衛星姿態角。也可以在衛星三個軸的方向安置若干個小的推力器,一旦衛星偏離所要求的姿態,相應方向的推力器就會噴出氣體,產生推力,改變衛星姿態角,使衛星處於所要求的位置。
