
簡介
定義
姿態軌道控制系統主要完成變軌和入軌任務,其中也包括爬升以及改變軌道傾角,以消除姿態靜態誤差,使衛星按預定姿態和軌道飛行,保證衛星性能,並完成飛行任務。
系統要求
姿態控制的任務是保證衛星在從星箭分離到在軌控制過程中保持正確的姿態,提供三軸穩定的對地指向,並保證獲得太陽能源。具體要求如下:
1)星箭分離後,進行速率阻尼,建立正確的對地指向;
2)伸桿後的天平動阻尼;
3)伸展太陽帆板,消除太陽帆板展開所引起的姿態擾動,建立衛星的正常姿態;
4)進行正常的姿態控制;
5)安全模式運行。
衛星的軌道控制任務如下:
1)在星箭分離後進行變軌使星座中各顆衛星到達預定的位置;
2)衛星星座在運行過程中通常都要求星座中的各衛星保持一定的相位,由於入軌及運行過程中各種攝動因素的影響,衛星的實際相位與標稱相位之間會存在一定的誤差。
3)星座運行過程中,為了防止由於攝動引起的衛星軌道漂移(衛星軌道高度發生變化)以及軌道傾角產生的變化,要求控制系統對星座能進行軌道保持。
4)需要合理安排備份星的位置,當星座中的衛星發生故障時將其推離原來的位置以便補充備份星。
姿態敏感器
姿態確定是姿態控制的前提,它的任務是利用星上的姿態敏感器測量所得的衛星姿態信息,經過處理求得固連於衛星本體坐標系相對於空間參考坐標系的姿態角信息。姿態確定系統主要由姿態敏感器和相應的信息處理算法即姿態確定算法組成,而姿態確定的精度則取決於姿態敏感器的精度和姿態確定算法的精度。姿態確定是否正確、精度的高低,直接關係到衛星的姿態控制與衛星的功能實現與衛星使用壽命。
目前,工程上套用的姿態敏感器主要包括以下幾類:
(1)利用地球物理特性的敏感器。如紅外地平儀、磁強計、地球敏感器、陸標跟蹤器等;
(2)利用天體位置的敏感器。如太陽敏感器、星敏感器;
(3)利用慣性信標的敏感器。如各種陀螺儀(有光纖陀螺、液浮陀螺、半球諧振陀螺等)、角加速度計;
(4)利用無線電信標的射頻敏感器
姿態軌道控制技術
衛星總體包括:結構分系統、姿態控制分系統、電源分系統、熱控分系統、星務管理分系統、測控通信分系統以及推進分系統等基本組成部分。姿態控制系統的作用是使衛星按預定姿態和軌道飛行,保證衛星性能,並完成飛行任務。國外小衛星的姿控技術已從早期的無控制(如美國oscAR.1系列衛星)不斷發展到自旋穩定;自旋穩定加無源磁阻尼器;自旋穩定加主動阻尼;重力梯度穩定;重力梯度加無源阻尼器;重力梯度加有源阻尼器;雙自旋穩定;偏置動量和零動量三軸穩定等系列。重力梯度穩定由於組成簡單,不需或較少需要姿態敏感器,通常只需配置阻尼磁力矩器(磁塊)就可在低圓軌道上進行穩定。但其結構複雜,指向精度低,難以適用於套用衛星,多數情況下可套用於科學試驗,如科學探測、新產品新器件上天考核、在軌通信方案等。
自旋穩定分全方向不加控制的任意姿態和具有一定指向控制要求兩種方式。前者一般用於通信試驗;後者為雙自旋,衛星結構複雜,多數用於通信試驗等。偏置動量控制作為主動控制是小衛星姿態控制方案中比較常用的;零動量控制一般套用於有姿態機動要求的高精度指向的小衛星。
如圖為幾種不同小衛星姿態控制的技術方案。
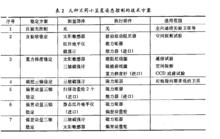 幾種不同小衛星姿態控制的技術方案
幾種不同小衛星姿態控制的技術方案目前國外通信和遙感等套用小衛星的姿態控制大多採用偏置動量三軸穩定方案。姿態測量部件主要有:三軸磁強計、紅外地平儀、太陽敏感器、星敏感器、掃描動量輪、陀螺、GPS定位等。執行部件主要有偏置動量輪、磁力矩器和推力器等。控制器主要採用衛星數字計算機。
國內提出了多種小衛星的技術方案,姿態控制的方案有重力梯度、自旋和偏置動量三軸穩定方案。由於空間科學試驗、通信科學試驗和新型有效載荷的科學試驗衛星等對指向精度要求不高,允許衛星姿態有較大的偏差,有些甚至可以不控制,姿態控制可採用重力梯度、自旋穩定等方案。但大多數套用型小衛星(如通信小衛星、遙感套用等小衛星)對姿態有一定的要求,因此它們大多選擇偏置動量穩定方案,以保證較高的適用性和通用性。
典型控制系統
“銥星”星座
銥系統是由66顆衛星聯網形成的可交換數字通信系統。“銥星”星座運行在6個極地軌道共同旋轉平面,分別相隔31.5度,傾角86度,每個極地軌道平面有11個衛星相等間距分布,衛星的高度為780km。在地面最小仰角為8.2°的條件下完成全球連續覆蓋。“銥星”採用三軸穩定,姿態精度±0.5°,位置保持的精度為±20km,衛星的壽命為5年。姿態控制分系統由敏感器、控制執行部件和電子處理設備組成。
“銥星”採用星敏感器、太陽敏感器作為姿態測量部件,星敏感器由兩個星跟蹤器組成。星跟蹤器是以恆星為參照物的。星跟蹤器在太空飛行器上實拍到星圖後,通過一系列計算,可確定星跟蹤器光軸在慣性空間的瞬時指向。因此,一般在飛行器上安裝兩個星跟蹤器,就可以自主地確定飛行器的姿態。動量輪、陀螺作為執行部件,用磁力矩棒給飛輪卸載,用磁強計確定磁力矩的極性。“銥星”系統的多種在軌功能,包括變軌機動、軌道捕獲、軌道調整、阻力補償和位置保持以及衛星指向控制和退出軌道都能由推進分系統完成。“銥星”採用先進的化學推進系統,採用單元肼燃料作為推進劑。
“全球星”星座
“全球星’’系統由48顆工作衛星和8顆軌道備份衛星組成。工作星位於8個軌道平面,每個軌道平面6顆衛星,衛星軌道高度1414km,傾角52°,相同軌道面內衛星間隔60°。“全球星”系統的衛星姿態和軌道控制系統的敏感器部件由下列部分組成:三軸模擬式太陽敏感器、一套紅外地球敏感器、一個三軸磁通門磁強計、一台雙GPS張量接受機。衛星姿態與軌道控制系統的執行機構由下列部分組成:5個單組元肼推力器,推力均為1N;4個動量飛輪,每個飛輪角動量為6N.m.s;2個磁力棒,每根磁力棒的磁矩為80Am 。
“全球星”系統的姿態控制共有三種控制模式:1)故障安全模式,在發生姿態控制故障時,使太陽電池帆板指向太陽,確保電源供應;2)姿態捕獲模式,首先捕獲太陽,然後捕獲地球;3)正常模式。
在正常模式下,由4個動量輪以四面體斜裝方式實現零動量偏置或動量偏置(當沒有偏航姿態信息時)三軸姿態穩定,同時也可以實現偏航姿態偏置的三軸穩定,後者是為了保證單軸太陽電池帆板定向控制,能滿足為非太陽同步軌道衛星長期提供滿功耗電源的需要。飛輪飽和由兩根磁力矩棒提供卸載力矩。星座軌道校正全部由單組元肼推力器承擔。
Orbcomm小衛星星座
Orbcomm是美國軌道科學公司研製並即將
建成的一個低軌道衛星數據通信系統。它由36顆小衛星組成,每顆衛星重大約42kg,其中28顆為工作星,另外8顆為備份。0rbcomm小衛星姿態控制系統的執行機構和敏感器包括兩個5Am 磁力矩器磁棒;一個5Am 磁線圈;兩個凝視式地球敏感器;三軸磁強計;六個粗太陽敏感器;天線與太陽帆板一體化裝置。姿控系統採用重力梯度穩定與磁控相結合。天線兼作重力桿,長度為3.2m,重1.5kg,伸桿方向為偏航軸。兩台紅外地平儀分別測量俯仰和滾動姿態角。太陽能帆板上裝有用於控制帆板指向的粗太陽敏感器。星上安裝兩根棒式5Am 磁力矩器和一個5Am 磁線圈,作為姿態磁控和重力梯度天平動阻尼。在偏航軸安裝一個反作用飛輪,用於控制偏航姿態。當軌道進動時,它可以滿足使太陽帆板指向太陽的要求。為了維持星座各星之間軌道相互位置,在星上安裝了用於確定每顆衛星的動態位置的GPS接收機。此外,還安裝了一套簡單落壓式冷氣(氮)推進系統,氮氣貯存在輕型複合材料貯箱中,該推進系統有兩個推力器,每個推力器的推力為0.4N。推力器沿衛星速度方向產生推力。這是用於捕獲衛星初始軌道必需的,也可作為衛星控制系統推力的備份。星座位置保持由姿態控制系統兼管,這主要是通過太陽帆板位置和偏航姿態角適當變化,產生氣動阻力差來實現的。
Orbcomm星座由於沒有星間通信,不需要軌道保持。對衛星只需作少量入軌機動以確保軌道平面之間的半長軸相同,從而減少軌道面交點線的相對漂移,以維持覆蓋均勻分布。在4年衛星壽命期內,漂移很小,因此不需要進一步作軌道修正。
研究現狀
當姿態確定系統完成姿態確定後,需要將姿態參數傳給姿態控制系統,以實現對衛星姿態的控制。姿態控制系統是保證衛星姿態穩定與衛星功能實現的關鍵,是衛星姿態控制系統的核心。姿態控制系統相對於姿態確定系統而言,主要包括控制規律設計和執行機構問題。
姿態控制系統的任務可分為姿態穩定和姿態機動兩方面。姿態機動是使衛星從一種姿態過渡到另一種姿態的再定向過程;姿態穩定是使衛星姿態保持在給定方向上,如對地定向、對日定向等。為了滿足不斷發展的空間任務對衛星姿態控制的更高要求,各國都在大力發展先進的控制理論和控制技術以提高姿態控制的精度。
(1)PID控制律是一種經典的控制方式。實踐證明,PID控制率是一種精確和具有先進性的控制律,它多為三軸穩定太空飛行器所採用,例如美國的Landsat-D衛星,Clementine月球探測器等。隨著先進理論和技術的發展,出現了自適應PID、自整定PID、自學習PID等改進的PID控制形式,進一步提高了它的性能和精度。目前PID控制已經廣泛被套用在航天領域。
(2)變結構控制規律
衛星在空間運行期間會遇到多種複雜情況,當要求衛星作大角度機動時姿態控制系統是一個強耦合非線性系統,而且某些系統參數不確定,例如星體慣量、干擾力矩變化等。變結構控制是解決非線性控制問題的一種綜合控制方法,其最大的優點是對系統的干擾與攝動具有完全的魯棒性。因此變結構控制器在太空飛行器領域的套用研究得以迅速發展。
(3)魯棒控制方法
自從上世紀80年代以來,魯棒控制理論引起了人們的高度重視,可以說是魯棒控制理論的發展階段。魯棒控制理論繼承了以往的魯棒性研究方法,以基於狀態空間模型的頻率設計方法為主,提出了從根本上解決控制對象模型不確定性和外界擾動不確定性問題的有效方法,在一定程度上彌補了現代控制理論對數學模型過度依賴的缺陷。不僅能夠用於單輸入反饋控制系統的魯棒性分析和設計,而且可以成功地套用到多輸入多輸出的場合,能夠設計出性能更優越、魯棒性能更好的反饋控制系統。並且隨著線性矩陣不等式方法的提出,線性系統的H∞控制理論體系已基本形成,其套用研究也取得了蓬勃發展。
隨著航天任務要求的不斷提高,對姿態控制的要求也日益提高,因此各國也在不斷的研究各種先進控制理論,各種理論也在不斷的發展。同時執行機構作為衛星姿態控制系統中的重要部分,它的選擇是否合理以及性能是否優越也是能否實現高精度控制的關鍵。衛星的執行機構主要有推力器、反作用飛輪及磁力矩器。其中以推力器為執行機構的三軸穩定姿態控制是一種主動式零動量姿態控制系統。其優點是回響快、指向精度高、但是由於常受到發動機所帶數量的影響,一般只用於姿態穩定和姿態機動所帶較小的情況。而一般國內外長壽命、高精度、高穩定度的衛星姿態控制系統,都是採用以飛輪為主要執行機構,當飛輪達到飽和時可以採用推力器或磁力矩器對飛輪進行卸載。
